Cảm biến cung cấp dữ liệu ngõ vào để điều khiển hệ thống và có thể lấy ở nhiều dạng khác nhau. Cảm biến rời rạc có thể báo hiệu sự xuất hiện hay biến mất của vật thể hoặc vị trí của cơ cấu chấp hành, trong khi cảm biến analog được sử dụng để nhận biết áp suất, vị trí, hoặc các tính chất vật lý khác cũng được mô tả.
Thiết bị rời rạc
Các cảm biến rời rạc được số hóa và cấp tín hiệu đóng mở. Chúng thường được đi kèm với cáp điều khiển, nhưng các loại cảm biến này lại đa dạng về các tùy chọn cáp ngắt kết nối nhanh (QD). Chúng thường là các loại 24VDC, 120VAC hoặc rơ le tiếp điểm khô.
Cảm biến DC sử dụng transistor dạng rắn như một công tắc. Có hai kiểu khác nhau phụ thuộc vào thiết bị đầu vào cơ bản, chúng được giao tiếp với: PNP(nguồn dòng), và PNP(rút dòng). Cảm biến nguồn dòng cấp chân dương cho ngõ vào, hoặc “nguồn” dòng. Có nghĩa là chúng phải được nối với đầu vào thiết bị kiểu NPN. Ngược lại với quá trình trên sẽ đúng với cảm biến rút dòng, chúng được kết nối với ngõ vào nguồn dòng giúp cho tạo ra sự chênh lệch về hiệu điện thế trong cảm biến.
Cáp QD được tiêu chuẩn hóa cho các cảm biến, hầu hết ở dạng micro hay pico QD. Các loại cáp thường có 3,4, hoặc 5 dây khác nhau, tùy vào các thông số của của cảm biến. Đối với các thiết bị lớn như màn sáng, một cáp QD với nhiều dây dẫn là điều rõ rang.
Nút nhấn, công tắc, và tiếp điểm khô
Nút nhấn và công tắc được sử dụng bằng máy móc hoặc người vận hành hệ thống để ra hiệu một hệ thống điều khiển thực hiện một nhiệm vụ hoặc cài đặt một trạng thái, như chế độ tự động hoặc chế độ điều khiển thủ công. Một nút nhấn thông thường chỉ có 2 trạng thái là on/off và có thể nó được giữ trong một số vị trí (chuyển đổi) – đóng mở momen. Hầu hết các loại nút nhấn đều ở dạng cơ khí và kèm theo một tiếp điểm điện phía bên kia của nút. Tiếp điểm có thể là thường đóng (NC) hay thường hở (NO). Một số nút lại ở dạng cảm ứng hoặc điện dung với dạng tiếp điểm cứng hay tiếp điểm cơ khí. Hình 3-4 thể hiện bảng ký hiệu cho một số thiết bị ngõ vào rời rạc. Công tắc chọn có thể có nhiều vị trí, mỗi một ví trí sẽ chia tiếp điểm hoặc nhóm tiếp điểm được liên kết với nó. Công tắc có thể được duy trì ở mỗi điểm, cho phép công tắc trở về vị trí home hoặc dựa theo hiệu ứng momen.
Tiếp điểm khô có thể được điều khiển bằng cuộn coil của rơ le hoặc tín hiệu cứng. Chúng thường được đi dây đến các ngõ vào của bộ điều khiển để thể hiện trạng thái hoặc điều kiện. Một sản phẩm phụ sử dụng tiếp điểm vật lý trong một mạch điện là transient. Mỗi khi công tắc được mở hoặc đóng trong một mạch điện, một sự tăng vọt hiệu điện thế được tạo ra. Dòng điện sẽ không bị gián đoạn ngay lập tức, và một vòng cung nhỏ tạo ra giữa các tiếp điểm. Việc này làm các tiếp điểm ảnh hưởng với nhau, gây ra sự ăn mòn. Nó cũng có thể tạo ra một tia lửa dẫn đến các nguyên nhân dễ gây cháy nổ trong môi trường. Nếu một bộ điều khiển tìm kiếm một trạng thái thay đổi của một ngõ vào , nó có thể phát hiển ra nhiều điểm trả lại nhờ vào transient. Điều này có thể gây ra nhiều vấn đề nếu một ngõ vào được sử dụng như một counter.
Các thiết bị vật lý như diode thường được sử dụng nhờ cuộn coil và tiếp điểm để giúp hạn chế những ảnh hưởng này, khi phần mềm không trả lại được sử dụng để bảo đảm các xung là của một quá trình nhất định trước khi chấp nhận chúng như một giá trị vào. Các thiết bị cứng thường có điểm chung là được sử dụng để hạn chế tối đa các ảnh hưởng của transient.
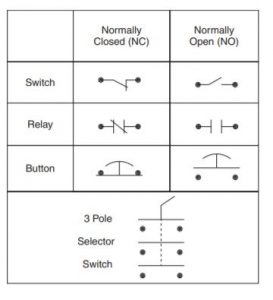
Hình 1Bảng ký hiệu các tiếp điểm khô
Mắt hình ảnh
Cảm biến quang học, hay mắt hình ảnh, phát và thu tín hiệu ánh sáng. Cảm biến thay đổi trạng thái khi ánh sáng thay đổi từ được thu đến không được thu hoặc ngược lại. Có hai điều kiện cho ngõ vào của cảm biến quang – Có ánh sáng, ngõ ra của cảm biến sẽ được nạp năng lượng khi phát hiện ánh sáng, và khi không có ánh sáng, ngõ ra của cảm biến cũng nạp năng lượng khi không thu được ánh sáng. Đây thường là tham số có thể lựa chọn với một công tắc hoặc dây dẫn.
Cảm biến quang thường có nhiều loại ở điện áp AC và DC, mặc dù điện áp DC được phổ biến hơn. Ngõ ra cảm biến quang DC được cấu hình theo ngõ ra dạng PNP hay NPN. Chúng thường được có đèn báo trên thân cảm biến để báo nguồn, trạng thái chuyển đổi, hay lượng dư ( lượng ánh sáng thu được).
Thông thường, cảm biến quang sử dụng đèn LED để tạo ra tín hiệu ánh sáng. Một cái ống kính thường được đặt phía trước bộ thu và phát nhằm khuếch đại tín hiệu ánh sáng. Đèn LED có thể có nhiều màu trong dải sáng thấy được hoặc trong môi trường hồng ngoại, là thứ giúp ánh sáng có một dải màu rộng. Tia laser được sử dụng để phát hiện chính xác hoặc các ứng dụng dải màu rộng. Đèn LED thấy được thường có màu đỏ, nhưng màu lục hoặc lam thường được dùng để khuếch tán hay các ứng dụng nhận biết màu sắc.
Khi cảm biến quang được đặt quá gần nhau thì nó có khả năng làm ánh sáng từ một đầu phát kích hoạt đầu nhận ở một con mắt khác. Để giảm khả năng này, các nhà sản xuất đã điều chỉnh lại ánh sáng ở một tần số khác cho các con mắt khác trong cùng một nhóm sản phẩm. Không phải hầu hết các cảm biến quang đều có tính năng này, nhưng vẫn có nhiều nhiều dòng cho phép những con mắt được phân biệt.
Thêm vào đó để phân loại cảm biến quang bằng kiểu ngõ ra, thì lại có rất nhiều thông số vật lý của cảm biến.
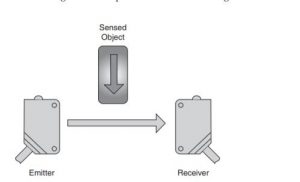
Mắt xuyên thấu có một bộ phát rời, nó sẽ phát ánh sáng và nhận lại tín hiệu và điều khiển trạng thái ngõ ra. Hình 2 thể hiện hình ảnh. Bởi vì cảm biến có hai dây riêng biệt để xác định nguồn và tín hiệu, nên nó có giá thành cao trong việc lắp đặt về thời gian và phần cứng hơn các loại khác. Mắt xuyên thấu có dải màu rộng và được nhận thấy là lý tưởng nhất cho việc phát hiện vật thể.
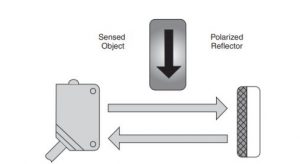
Mắt hình ảnh thu hồi sử dụng một băng phản chiều hay nhựa phản xạ để ánh sáng bật lại đầu thu, như hình 3. Bộ thu và phát đều được dựng cùng nhau và sử dụng dây nguồn chung, điều đó làm giảm giá thành hơn so với kiểu mắt xuyên thấu, nhưng lại bị giới hạn về dải màu.
Để hạn chế tối đa việc ánh sáng dội lại bề mặt phản chiếu, tín hiệu phân cực thường được sử dụng. Một phản xạ kiểu góc khối thay đổi ánh sáng một góc 90 độ trước khi ánh sáng đo được thu về, và chỉ có duy nhất ánh sáng lệch pha với với ánh sáng được phát được chấp nhận như một tín hiệu. Nó cho phép mức tăng đầu vào của mạch cài đặt ở mức cao hơn kể từ khi cảm biến loại bỏ các tín hiệu từ vật phản xạ cao mà không bị lệch pha.
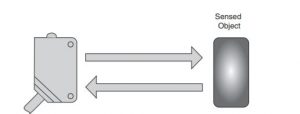
Mắt phản xạ khuếch tán sử dụng vật thể được phát hiện như một mục tiêu, hình 3. Ánh sáng được phát từ bộ phát và được thu lại tương tự từ các bộ phát khác, tuy nhiên ánh sáng được nhận sẽ chỉ ra sự có mặt của vật thể , giống như mắt xuyên thấu hay mắt hình ảnh thu hồi. Cảm biến quang khuếch tán phản xạ không phải là một cảm biến lý tưởng được sử dụng nhận biết sự có mặt hay không có mặt của vật thể, kể từ khi lượng ánh sáng nhận được bị ảnh hưởng bởi độ phản xạ và màu sắc mục tiêu. Tuy nhiên, tính chất này có thể được sử dụng như một lợi thế khi dùng cảm biến để phân biệt giữa các màu sắc khác nhau. Một tín hiệu của LED đỏ sẽ phản xạ lại mạnh hơn đối với một vật thể màu đỏ so với các vật thể màu lục và ngược lại. Kỹ thuật sử dụng LED đỏ, lục, lam, vàng, và trắng như đèn nguồn thường được dùng làm mắt phát hiện màu sắc.
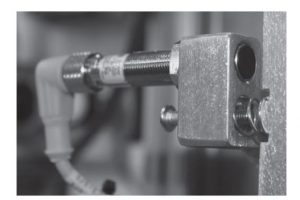
Có nhiều thông số vật lý khác được dùng cho cảm biến quang. Bộ khuếch đại cung cấp năng lượng cho LED thu và phát có thể tự bao gồm các ống kính hoặc nó đầu gắn các sợi quang, hình 4. Các sợi này có thể được làm từ nhựa hoặc thủy tinh. Sợi nhựa này thường có một sợi nhựa đục bao bọc xung quanh các sợi bên trong. Bằng cách này, các sợi nhựa bên trong sẽ được bảo vệ và có tác dụng như một như một sóng điều hướng cho ánh sáng phản xạ lại trong lõi, giữ cho ánh sáng không lọt ra ngoài. Các loại sợ thủy tinh thường được dùng cho các ứng dụng với khoảng cách xa , tuy nhiên thì chúng lại dễ bị vỡ hơn các sợi nhựa. Sợi nhựa có thể được uốn cong trong một bán kính nhỏ hơn so với sợi thủy tinh.
Ống kính và các mẹo góc phải thường được sử dụng cho sợi quang. Phần cuối của cáp quang thường được xâu chuỗi lại để sử dụng. Sợi nhựa có thể được cắt theo chiều dài sử dụng bằng máy cắt nhỏ, là thứ thường có sẵn từ các nhà sản xuất. Sợi thủy tinh thường được chê tạo cuối cùng nhằm tránh bị thiệt hại và được tính giá tiền theo chiều dài.
Hình 4 Bộ khuếch đại cáp quang
Hệ thống quan sát
Còn được biết với tên gọi là tầm nhìn máy, hệ thống quan sát sử dụng bộ xử lý vi điều khiển hoặc xử lý tầm nhìn để kiểm tra, đo đạc và các nhiệm vụ hướng dẫn. Trong khi thị giác máy tính hầu hết được tập trung vào quá trình xử lý hình ảnh, thị giác máy cũng yêu cầu các thiết bị số I/O để điều khiển các thiết bị sản xuất khác. Thị giác máy được dùng để kiểm tra quá trình sản xuất sản phẩm như chip bán dẫn, các thành phần tự động, thức ăn, hoặc dược phẩm. Nó còn thường được dùng như một phương pháp hướng dẫn cho các cánh tay robot.
Chỉ như sự kiểm tra của con người trên các quá trình lắp ghép mới có thể đánh giá được chất lượng của sản phẩm, nên thị giác máy sử dụng camera thông minh hoặc camera số cùng với phần mềm xử lý ảnh trên máy tính để thực hiện tương tự quá trình kiểm tra. Các tính năng riêng biệt của mỗi phần có thể được chỉ định thông số để quyết định cơ sở cho việc phát hiện/không phát hiện, số đo vi sai, màu sắc, khiếm khuyết trên bề mặt và một số khía cạnh trong việc quan sát khác.
Hệ thống thị giác máy còn được lập trình để thức hiện các tác vụ đơn giản như đếm sản phẩm trên băng tải, đọc chuỗi, và đo đạc. Sở thích của các nhà sản xuất hệ thống thị giác máy thường hướng đến các trường hợp yêu cầu về tốc độ cao, độ khuếch đại lớn, hoạt động 24h, hoặc đo đạc liên tục. Hệ thống quan sát sẽ thích hợp hơn so với con người do không ảnh hưởng đến sự mất tập trung, ốm đau, hay các giới hạn khác về thể chất cũng như tinh thần; nhưng con người vẫn tốt hơn về khả năng đánh giá chất lượng và phù hợp cho việc tìm ra các khuyết điểm mới mà máy móc không phát hiện được.
Máy tính không thể “nhìn” được theo cách mà con người làm. Camera không thể nào tương đương với khả năng quan sát của con người. Các thiết bị máy tính ‘nhìn’ bằng cách kiểm tra các điểm phân giải riêng biệt của hình ảnh, xử lý chúng và cố gắng đưa ra kết quả nhờ vào sự hỗ trợ của các thông tin cơ sở và các tính năng như cơ chế nhận ra được hình dạng của vật thể. Mặc dù một số thuật toán về thị giác máy đã được phát triển để sao chép lại sự nhận thức quan sát của con người, nhưng không hệ thống thị giác máy nào có được khả năng quan sát của con người về mặt hiểu biết hình ảnh, dung sai cho nhiều loại ánh sáng, sự suy giảm về hình ảnh, và các sự biến đổi khác.
Một số các phương pháp xử lý riêng biệt được phát triển nhằm xử lý hình ảnh và nhận diện các tính đặc điểm liên quan đến hình ảnh theo một cách hiệu quả và cách thức phù hợp. Thiết bị dùng để phát hiện các cạnh hoặc đếm độ phân giải trong một cường độ xác định hoặc dải nhạy sáng; “blob” là thiết bị dùng để nhận biết được hình dạng hoặc bóng của một vật thể xác định; các công cụ sử dụng để nhận biết màu sắc hay văn bản.
Một hệ thống thị giác máy thông thường sẽ bao gồm một số thành phần đi kèm:
- Camera số hóa hoặc analog (trắng đen hoặc có màu) sử dụng quang học để có được hình.
- Số hóa hình ảnh giao diện camera. Chúng thay đổi hình ảnh theo dạng chuẩn số hóa, thường là một mảng hai chiều của các giá trị cường độ. Tiếp theo chúng được đặt trong bộ nhờ để xử lý bằng các phần mềm thuật toán.
- Một bộ điều khiển (thường là PC hoặc bộ điều khiển nhúng, như bộ DSP)
- Phần cứng I/O (dạng số I/O) hoặc giao tiếp theo các đường truyền (thường sử dụng một mạng hoặc kết nối RS-32) để báo cáo kết quả.
- Một thấu kính để tập trung vào khu vực muốn quan sát trên cảm biến hình ảnh.
- Một nguồn sáng phù hợp (LED, đèn huỳnh quang hay đèn halogen và các loại khác). Việc chiếu sáng được thiết kế nhằm nâng cao hoặc nhấn mạnh lên một tính năng nhất định khi bị che khuất hoặc giới hạn lại những phần không muốn quan sát. Tạo ra hoặc loại bỏ bóng của vật thể là một trong những những nguyên lý chính cho việc tăng ánh sáng.
- Một chương trình để xử lý hình ảnh và phát hiện các tính năng liên quan.
- Một cảm biến đồng bộ cho các bộ phận phát hiện( thường là mắt hình ảnh hoặc công tắc hành trình) để kích hoạt các hình ảnh thu được và xử lý chúng. Cảm biến này có thể được sử dụng để kích hoạt các xung đồng bộ chiếu sáng nhằm làm hình ảnh sắc nét.
Trong một số trường hợp, một số hoặc tất cả các thành phần bên trên được kết hợp trong một thiết bị , gọi là camera thông minh. Sử dụng một bộ xử lý nhúng để loại bỏ việc cần phải có một card khung hình và máy tính bên ngoài, giảm giá thành và hệ thống phức tạp trong khi cung cấp sức mạng xử lý cho camera. Camera thông minh thường có giá thành rẻ hơn các hệ thống tạo thành của một camera và một máy tính ngoài. Hình 3.18 thể hiện hai loại camera khác nhau.

Hình 5 Camera Cognex
Camera phía bên phải được sử dụng để đọc hình ảnh bar code. Chú ý đến thấu kính điều chỉnh trên camera bên trái; chúng được sử dụng để điều tiết ánh sáng vào và tập trung vào hình ảnh.
Bản thân của camera thông thường sử dụng cảm biến hình ảnh CCD hoặc CMOS. Cả hai thiết bị thực hiện nhiệm vụ chuyển đổi ánh sáng thành tín hiệu điện. Mảng phân giải tạo ra một hình ảnh theo mẫu ánh sáng và vùng tối được tập trung trên cảm biến thông qua ảnh của camera. Mức cường độ sau đó được xử lý bằng phần mềm và có thể được phân tích bằng nhiều công cụ khác.
Thông thường thì phần mềm sẽ phải làm một số bước để xử lý hình ảnh. Ảnh đầu tiên được xử lý khử nhiễu. Nó cũng có thể chuyển đổi một sô sắc thái tương tự của màu xám thành một sự kết hợp đơn giản hơn là trắng và đen, quá trình xử lý này là nhị phân hóa. Để thực hiện quá tình này một ngưỡng analog được cài đặt trong phần mềm. Sau khi đơn giản hóa hình ảnh, phần mềm có thể đếm hoặc nhận dạng được vật thể và đo hoặc xác định kích thước hình dạng và đặc điểm. Bước cuối cùng là pass hoặc fail các hình ảnh thu được dựa vào các tiêu chuẩn do người dùng nhập vào. Kết quả sau đó sẽ được kết nối thông qua tín hiệu số, hoặc kết nối để điều khiển hệ thống có thể xử lý trên thông tin nhằm loại bỏ hoặc thực hiện quá trình.
Mặc dù hầu hết các hệ thống thị giác máy phụ thuộc vào camera trắng-đen, nhưng việc sử dụng camera màu đang ngày càng trở nên phổ biến. Chúng cũng gia tăng sự phổ biến của hệ thống thị giác máy bao gồm các thiết bị số kết nối trực tiếp hơn là một camera và tách khung, lý do làm giảm tín hiệu.
Cảm biến X-ray cũng thường được sử dụng để quan sát phía bên trong vật liệu để tìm các điểm sai sót như các vết nứt hay bọt khí. Khi được kết hợp với công nghệ quan sát, các loại cảm biến này được sử dụng để phân loại vật liệu tự động.
Sắc ký khí
Sắc ký khí – khối phổ (GC-MS) là một phương pháp sử dụng trong các nhà máy hóa học và xử lý hóa chất bằng cách nhận dạng và tách các hóa chất. Phương pháp này yêu cầu một chất mẫu thử được lấy được ion hóa, gia tốc, khúc xạ, và phát hiện ở mức phân tử. Các thiết bị sử dụng cho quá trình này khá mắc tiền nhưng lại thường dùng trong các ngành công nghiệp thực phẩm, ăn uống và y dược.
Bar code, RFID và ID điện cảm
Bar code là một phương pháp thể hiện dữ liệu bằng cách đặt dữ liệu vào định dạng mà máy có thể thấy và đọc được. Thông thường, bar code chỉ được thể hiện bằng các đường thẳng song song, khác nhau về độ rộng và khoảng cách với nhau để mã hóa các chữ số. Đó gọi là mã một chiều hoặc mã vạch tuyến tính. Mã hai chiều ngày nay đã được sử dụng rộng rãi nhờ vào công nghệ đọc được phát minh.
Đọc tuyến tính hay đọc một chiều cần một nguồn sáng để phản chiếu lại các đường kẻ trắng đen tới mắt ảnh khuếch tán. Nguồn sáng thường là đèn LED đỏ hoặc laser. Để bao quát được một bề mặt lớn, ánh sáng phát đôi khi sẽ quét hoặc di chuyển lên xuống. Hình 3.19 thể hiện một mã vạch tuyến tính thông thường
Việc vẽ sơ đồ hình dạng thông qua các đặc tính được gọi là “diễn tả tượng trưng”. Tính năng này bao gồm việc mã hóa cho các ký tự chữ số cùng với các ký tự bắt đầu và các ký tự dừng lại và kiểm tra tổng thể lại( sơ đồ phát hiện lỗi đơn giản).
Có hơn 30 kiểu mã hóa một chiều khác nhau đang được sử dụng. Nhưng hầu hết chúng đều rơi vào 2 nhóm, rời rạc và liên tục, phụ thuộc vào các ký tự bắt đầu và kết thúc. Chúng còn có phân loại kiểu độ rộng giữa hai vạch hoặc độ rộng giữa nhiều vạch khác nhau. Còn một số kiểu “diễn tả tượng trưng” phổ biến khác như UPC, code 39, và xen kẽ 2 của 5. Hầu hết bộ đọc của các loại mã hóa một chiều có thể được cài đặt để đọc bất cứ định dạng phổ biến nào.

Hình 6 mã vạch một chiều (1-D)
Mã vạch sau này được phát triển theo dạng ký hiệu hai chiều (2-D). Những mã vạch này thường được làm theo dạng hình chứ nhật, dạng chấm, dạng lục giác, hoặc các dạng hình học xếp theo mô hình lưới khác. Bộ đọc của mã vạch 2-D thường dùng camera CCD để bắt hình ảnh của mã vạch. Ký hiệu hai chiều không thể đọc bằng laser vì chúng thường có dạng quét. Hình 6 thể hiện mã vạch hai chiều.
Một số loại mã hóa thông thường ở dạng ký hiệu 2 chiều là ma trận dữ liệu, Codablock, EZcode, hay QR code. Nền công nghiệp tự động là những người dùng chính của dạng mã hóa ma trận dữ liệu vì hình dạng của nó có thể được in trực tiếp lên các phần kim loại bằng hệ thống tạo con dấu hay ‘dấu chấm”. Khắc laser cũng được sử dụng với cùng một mục đích như vậy.
Hệ thống nhận dạng tần số vô tuyến điện (RFID) là một phương pháp khác gắn mác các bộ phận hay nhận dạng chúng. Tuy nhiên không giống như mã vạch, các thẻ không cần phải trong pham vi tầm quét của bộ đọc và đôi khi chúng được gắn vào bên trong một vật. Một kiểu sử dụng hệ thống RFID thông dụng trong nền công nghiệp tự động là dò tìm hoặc vận chuyển thông qua một quá trình xử lý. Một hệ thống RFID bao gồm một bộ thu phát sóng radio cho kết nối hai chiều với một bộ xử lý thông tin nhận được, và các thẻ RFID có chứa thông tin. Các thẻ gồm có mạch tích hợp có chứa dữ liệu và ăng ten. Bộ đọc RFID gửi tín hiệu đến thẻ và đọc tín hiệu phản hồi của nó. Đôi khi nó cũng hoạt động như một hệ thống đọc-ghi, có thể phát dữ liệu đến mác gắn với mục đích dò tìm.
Các thẻ RFID có thể ở dạng bị động, sử dụng phát năng lượng vô tuyến thông qua bộ đọc để cấp nguồn cho mạch của nó, hoặc kích hoạt một viên pin nhỏ bên trong. Một lựa chọn khác là thẻ thụ động dùng pin, chúng chỉ được kích hoạt khi có sự xuất hiện của bộ đọc. Thẻ thụ động có thể được làm nhỏ hơn và tiết kiệm chi phí hơn là việc kích hoạt hoặc dùng mác gắn thụ động có pin, nhưng chúng phải được đặt rất gần với bộ đọc để có thể nhận được tín hiệu đủ mạnh khi kích hoạt thẻ. Hình 7 thể hiện một bộ đọc và một số thẻ RFID

Hình 7 Mã vạch 2-D

Hình 8 Bộ đọc RFID và thẻ
Các thẻ có thể bao gồm một số seri duy nhất được mã hóa để tìm kiếm thông tin trong một cơ sở dữ liệu hoặc thông tin liên quan đến nơi giữ sản phẩm như số lô, ngày sản xuất, hoặc các dạng mã hóa khác. Các thẻ đọc-ghi có thể được mã hóa ở nhiều vị trí khác nhau như một phần của việc chuyển trong quá trình sản xuất, hoặc chúng cũng có thể là dạng ghi một lần – đọc nhiều lần hay còn gọi là thẻ có thể lập trình. Thông tin mã hóa trong thẻ sẽ được lưu trữ điện tử bằng bộ nhớ bất biến.
Hệ thống RFID thường hoạt động ở tần số cao (HF) hoặc tần số siêu cao (UHF) trong dải đo phổ vô tuyến. Khoảng cách thẻ RFID có thể được đọc là ít hợn một bước chân đối với các hệ thống rẻ tiền, còn với các thẻ lớn hơn thì khoảng cách có thể lên tới hàng trăm bước. Nhiều hơn một thẻ tại một thời điểm có thể phản hồi lại tín hiệu dò được phát ra bởi bộ đọc, do vậy để phát hiện va chạm thường là tính năng quan trọng cho một bộ điều khiển RFID.
Hệ thống ID điện cảm phục vụ một tính năng tương tự với hệ thống RFID nhưng nó sử dụng một cuộn dây giống với công tắc hành trình. Bộ đọc sẽ kích thích cho mạch tạo dao động trong thẻ để phát một số mã hóa. Hệ thống ID điện cảm có giá thành thấp hơn và nhạy hơn đối với sóng vô tuyến, nhưng thường lại xử lý thông tin được ít hơn.Chúng cũng có dải đo ngắn hơn. Giống như thẻ RFID, thẻ điện cảm cũng có thể ở dạng được kích hoạt hoặc bị động, ghi- chép, hoặc chỉ đọc.
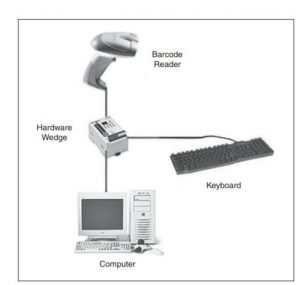
Bàn phím Wedge
Bàn phím wedge là một cách giao tiếp cho phép một thiết bị như máy quét mã vạch hoặc đầu đọc từ mô phỏng một bàn phím. Cái tên wedge thể hiện vị trí vật lý mà nó được nêm giữa bàn phím và cổng kết nối máy tính. Hình 9 minh họa cho sự sắp xếp này. Ví dụ, một đầu đọc mã vạch chuyển đổi mã được quét ra định dạng chữ số mà con người có thể đọc và sau đó chuyển nó qua thông qua cái nêm giống như chúng được gõ trên bàn phím. Máy tính sẽ không biết dữ liệu từ đâu đến và dữ liệu được biên dịch một cách liền mạch.
Một bàn phím wedge cũng có thể là một chương trình phần mềm lấy thông tin từ USB hoặc cổng COM và truyền nó qua một bộ đệm bàn phím. Lại một lần nữa, đây là một quá trình chuyển đổi từ hướng nhìn của máy tính. Đây là một giải giải pháp tiết kiệm của việc giao tiếp thẻ quét hoặc đọc mã vạch với hệ thống điều khiển , nhưng thông thường các kỹ sư thiết kế sẽ chọn cổng kết nối chuyên dụng của các thiết bị ngoại được sử dụng thường xuyên.
