Sự khác biệt giữa TwinTrack và Học lệnh bằng tay
Cả hai đều cung cấp một cách trực quan hơn để lập trình robot của bạn so với lập trình thông thường. Nhưng, sự khác biệt giữa TwinTrack và hướng dẫn bằng tay là gì?
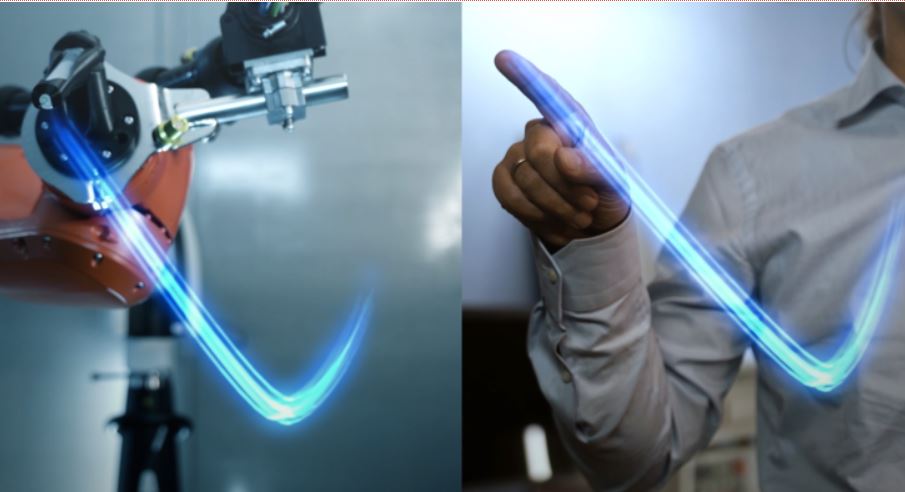
Công ty phần mềm robotdk phát hành TwinTrack, công cụ lập trình mới dành cho robot công nghiệp. Nó cho phép bạn lập trình robot của mình đơn giản bằng cách lần theo đường đi bạn muốn bằng đầu dò cầm tay của máy theo dõi laser, không cần lập trình thông thường.
Bạn có thể đang nhìn vào TwinTrack và tự hỏi “Nó không chỉ mang lại cho tôi những lợi ích tương tự như hướng dẫn bằng tay sao?”
Mặc dù có một số điểm tương đồng giữa TwinTrack và Hướng dẫn bằng tay, nhưng chúng rất khác nhau về những gì chúng cho phép bạn đạt được.
Sau đây là phân tích về hai phương pháp lập trình.
TwinTrack là gì?
TwinTrack cung cấp cho người dùng robot một cách tiếp cận mới để lập trình ngoại tuyến. Không giống như lập trình robot thông thường – đòi hỏi đào tạo và thường là kỹ năng lập trình , TwinTrack có thể được sử dụng bởi bất kỳ ai.
Nếu nhiệm vụ đã chọn của bạn hiện đang được thực hiện bởi một kỹ thuật viên, người đó hiện có thể dạy nhiệm vụ trực tiếp cho robot mà không cần phải dựa vào các lập trình viên không biết rõ về nhiệm vụ đó.
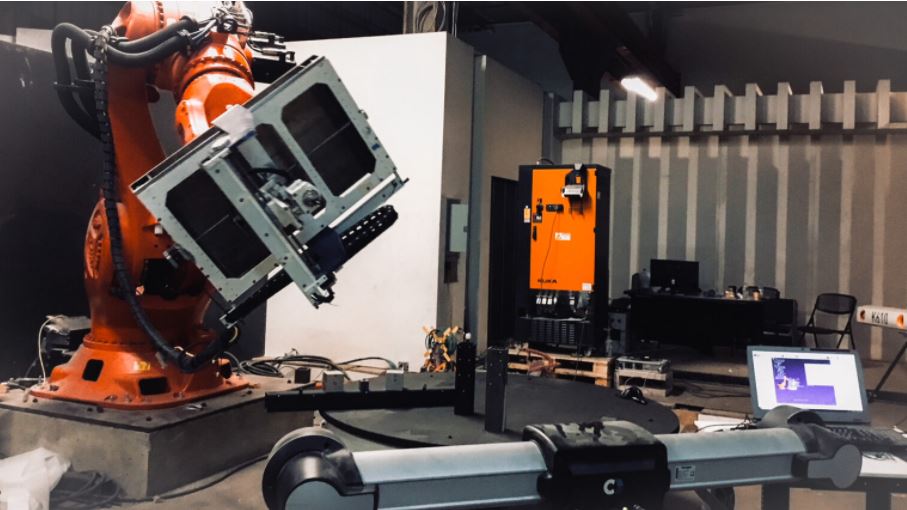
TwinTrack sử dụng một công cụ theo dõi laser có sẵn để phát hiện vị trí chính xác và tương thích với các máy quét laser từ các thương hiệu khác nhau.
Học lệnh bằng tay là gì?
Học lệnh bằng tay là một phương thức lập trình trực tuyến thường được kết hợp với các rô bốt cộng tác. Nó cho phép người dùng lập trình robot bằng cách kéo vật lý nó tới các vị trí mong muốn trong không gian làm việc.
Vì nó là một phương pháp lập trình trực tuyến, nó yêu cầu quyền truy cập vào robot vật lý trong quá trình lập trình. Ngoài ra, nó yêu cầu bạn phải chạm vào robot khi nó hoạt động vì vậy robot phải hoạt động ở chế độ an toàn.
3 điểm tương đồng giữa TwinTrack và Hand Guiding
Cơ bản, 2 phương pháp có 1 số điểm tương đồng. Dưới đây là 3 điểm tương đồng có liên quan nhất:
- Yêu cầu lập trình thông thường
Cả TwinTrack và hướng dẫn bằng tay đều cung cấp một cách dễ sử dụng để lập trình rô bốt mà không cần lập trình robot thông thường.

Theo lập trình thông thường là:
- Sử dụng ngôn ngữ lập trình độc quyền của nhà sản xuất để tạo các chương trình trên mặt dây dạy học của rô bốt hoặc ngoại tuyến.
- Di chuyển robot vào vị trí bằng cách sử dụng bộ học lệnh.
Cả hai lựa chọn này đều yêu cầu đào tạo hay kinh nghiệm đáng kể về robot công nghiệp. Do đó, chúng không dễ dàng tiếp cận với những người mới sử dụng robot.
- Học lệnh theo mục tiêu trực quan
Lập trình robot bao gồm việc dạy các mục tiêu mà bạn muốn nó di chuyển đến. Trong lập trình robot thông thường, điều này đòi hỏi bạn phải có kiến thức chuyên sâu về hệ tọa độ của robot. Ít nhất, bạn phải hiểu các góc Euler và có thể thực hiện các phép tính hình học bằng cách sử dụng chúng.
Cả TwinTrack và học lệnh bằng tay đều cho phép bạn phân phối hoàn toàn với những thứ này. Bạn chỉ cần chỉ ra nơi bạn muốn robot di chuyển (sử dụng đầu dò cầm tay hoặc robot tự di chuyển) và hệ thống sẽ tìm hiểu mục tiêu.
- Học điểm và quỹ đạo di chuyển
Hầu hết các chuyển động của robot có thể được hạ xuống mục tiêu hoặc quxy đạo. Nếu bạn muốn robot di chuyển đến một điểm cụ thể, bạn sẽ dạy nó một mục tiêu. Nếu bạn muốn robot đi theo một đường thẳng hoặc đường cong cụ thể, bạn sẽ dạy nó quỹ đạo.
Cả TwinTrack và hướng dẫn bằng tay đều cho phép bạn dạy các điểm và quỹ đạo (mặc dù một số hình thức hướng dẫn bằng tay có thể không hỗ trợ đường dẫn).
5 Điểm khác biệt giữa TwinTrack và Học lệnh bằng tay
Mặc dù hai phương pháp lập trình tương tự nhau về một số mặt, nhưng giữa chúng có nhiều điểm khác biệt hơn những điểm tương đồng.
Dưới đây là 5 điểm khác biệt quan trọng giữa TwinTrack và học lệnh bằng tay:
- Tốc độ
Một vấn đề với hướng dẫn bằng tay là bạn cần phải kéo robot xung quanh không gian làm việc của nó để chỉ dẫn các điểm và đường đi. Điều này có thể mất nhiều thời gian và có thể khá mệt mỏi nếu bạn phải lập trình một tác vụ lớn.
Với TwinTrack, bạn có thể lập trình điểm nhanh nhất có thể khi di chuyển đến các vị trí mục tiêu.
- Độ chính xác
Hướng dẫn bằng tay thường bị chỉ trích là một phương pháp lập trình robot có độ chính xác thấp. Đây là một lời chỉ trích hợp lý. Rất khó để định vị chính xác robot khi bạn tác động vật lý.
Nhờ sử dụng thiết bị theo dõi laser, TwinTrack có thể phát hiện vị trí mục tiêu với độ chính xác đến 0,150mm, chiều rộng của sợi tóc người.
- Khả năng tương thích với Robot
Một vấn đề lớn với hướng dẫn bằng tay là nó chỉ bị hạn chế đối với một số nhà sản xuất robot. Nếu nhà sản xuất của bạn cung cấp tùy chọn hướng dẫn bằng tay, bạn có thể sử dụng nó. Nếu không, bạn có thể làm được rất ít.
TwinTrack tương thích ngay với hơn 500 robot từ 50 nhà sản xuất robot và con số này đang tăng lên liên tục.
- Lập trình ngoại tuyến
Một điểm khác biệt cơ bản giữa hai phương pháp lập trình là TwinTrack được thiết kế như một công cụ lập trình ngoại tuyến và hướng dẫn bằng tay chỉ là một hình thức lập trình trực tuyến.
Vấn đề với lập trình trực tuyến là nó yêu cầu bạn phải có robot. Điều này có nghĩa là đưa nó ra khỏi sản xuất lâu hơn bất cứ khi nào bạn muốn thay đổi chương trình của robot.
Phải nói rằng, cũng có thể sử dụng TwinTrack để lập trình trực tuyến.
- Hiệu chuẩn
Một điểm cộng bổ sung của TwinTrack là nó cũng cho phép bạn hiệu chỉnh robot của mình chỉ bằng phần cứng mà nó chạy trên đó.
Hiệu chuẩn đảm bảo rằng bộ đôi kỹ thuật số của robot của bạn trong phần mềm lập trình ngoại tuyến thực sự là đại diện chính xác của robot thực. Độ chính xác là mối quan tâm chung của những người lần đầu sử dụng lập trình ngoại tuyến.
Cái nào tốt hơn? TwinTrack hay Hướng dẫn bằng tay?
Bạn đã xem xét những điểm giống và khác nhau giữa hai công nghệ và bạn đang tự hỏi lựa chọn nào tốt nhất cho mình.
Giống với rất nhiều quyết định trong cuộc sống và kinh doanh, câu trả lời là “phụ thuộc”
Nếu rô bốt của bạn có hướng dẫn bằng tay và bạn không quan tâm đến tốc độ lập trình, độ chính xác, lập trình ngoại tuyến hoặc hiệu chuẩn, bạn chỉ cần sử dụng hướng dẫn bằng tay có thể hợp lý. Miễn là nó không yêu cầu đầu tư thêm từ phía bạn – tức là nó là một tính năng tiêu chuẩn cho robot của bạn – thì bạn thực sự không có gì để mất khi dùng thử.
Tuy nhiên, nếu bất kỳ lợi ích nào của TwinTrack là quan trọng đối với bạn, bạn nên xem xét nó như một lựa chọn.
Lựa chọn công cụ lập trình robot của bạn là điều rất quan trọng, vì vậy bạn phải chịu trách nhiệm với sự lựa chọn của mình.
Link gốc:
