Bạc đạn và puli
Bạc đạn cho phép tiếp xúc trượt hoặc tiếp xúc lăn giữa hai hoặc nhiều phần với nhau. Chúng được chia làm 3 loại cơ bản dựa vào mục đích sử dụng: bán kính bạc đạn hỗ trợ cho các trục xoay hoặc các ổ đỡ, ổ chặn hỗ trợ cho các tải dọc trục trên các phần tử xoay, và ổ trục định hướng hỗ trợ và điều hướng chuyển động của các phần tử theo một đường thẳng. Bạc đạn thường được mô tả bởi nguyên lý hoạt động hoặc định hướng tải được áp dụng.
Bạc đạn cung cấp tiếp xúc trượt được biết đến như một ổ trượt. Các chuyển động tương đối giữa các phần của ổ trượt có thể là loại được bôi trơn, có thể là một bề mặt thủy động lực học ( một cái nêm hoặc tấm phim tích chất bôi trơn được tạo ra bởi bề mặt ổ trượt) hoặc bề mặt thủy tĩnh (một chất bôi trơn được đưa vào các bề mặt liên hợp dưới áp suất). Bề mặt chuyển động có thể không cần được bôi trơn với các vật liệu như nylon, đồng thau hoặc Teflon. Ổ trượt còn được biết đến như ống lót khi chúng vận hành trên một trục. Hình 1 cho thấy hình ảnh của một bạc đạn đũa với con lăn hình trụ. Các bạc đạn đũa thông thường có hệ số ma sát thấp hơn so với các ổ trượt và vì vậy chúng ít bị mất năng lượng hơn. Chúng thông thường cũng giữ độ dung sai chặt chẽ hơn và chính xác hơn. Các phần tử lăn và rãnh bạc đạn được làm cứng để giảm bị mài mòn. Bạc đạn kiểu lăn cũng được che chắn để giảm bớt các chất bẩn xâm nhập vào rãnh bạc đạn.

Cách sử dụng bạc đạn ổ đũa tịnh tiến và đường ray là một trong các phương các phương pháp điều hướng phổ biến cho các chuyển động tịnh tiến. Chúng thường hỗ trợ cho các loại vít me bi hoặc trục vít dẫn động bánh răng cho các ứng dụng điều khiển chuyển động. Một đường ray với hai dãy bi được thể hiện trong hình 2

Một bạc đạn khí là một thiết bị khí nén sử dụng một lớp màng không khí giữa các bề mặt. Chúng thường được sử dụng để di chuyển các tải nặng trên một tầng bề mặt, tương tự như tàu đệm khí hoặc bàn khí chơi khúc côn cầu. Bạc đạn khí xoay, quay tròn, và trượt hầu như cung cấp cho các chuyển động không có lực cản và rất chính xác. Bạc đạn khí có thể được mở rộng tăng áp khí với một dòng khí liên tục hoặc tạo ra một mảng khí từ các chuyển động tương đối của hai bề mặt.
Một puli, đôi khi được gọi là con lăn có rãnh, là một bánh xe hoặc cái tang được gắn vào một trục. Thông thường nó sẽ có một đường rãnh giữa hai mép cạnh để giữ đai, xích, hoặc cáp truyền động. Puli có thể thay đổi hướng hoặc tốc độ chuyển động, tương tự cách của hộp số. Sự khác nhau về kích thước của puli làm thay đổi tốc độ theo một tỉ lệ với đường kính hoặc chu vi của puli. Ví dụ, nếu một cặp puli có đường kính theo tỉ lệ 2:1, thì tốc độ sẽ tăng theo tỉ lệ đó.
Puli thường được sử dụng với đai truyền động linh hoạt trong các ứng dụng công nghiệp. Nó được dùng phổ biến với đai răng gia cố bằng thép trong một cơ cấu chấp hành sử dụng đai truyền động nhằm cung cấp một chuyển động tịnh tiến. Trong trường hợp này, puli cũng có các rãnh trong mặt song song với trục, như trong hình 3. Chúng được gọi là đai truyền động không trượt. Dây đai và puli là sự kết hợp không cần truyền động không trượt hay còn gọi là truyền động không ma sát.
Góc độ của dây đai có mối liên quan đến puli được gọi là góc ôm. Sự kết hợp dây đai và puli nên được lựa chọn góc ôm nhỏ hơn puli ít nhất là 120 độ cho một dây đai truyền động ma sát. Đối với dây đai co răng, góc ôm có thể gần 90 độ. Bất cứ góc nào nhỏ hơn 90 có thể làm dây đai bị trượt răng.
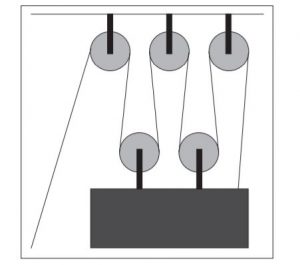
Puli có thể được xếp kết hợp với nhau để tạo ra lợi ích về cơ khí cùng với việc giảm tốc độ. Đối với bất kỳ cặp puli , chúng thường sử dụng tốt nhất là không quá tỉ lệ 8:1, và tỉ lệ 6:1 là phù hợp tối đa. Nếu một tỉ lệ lớn hơn được yêu cầu, cách tốt nhất là sử dụng một hệ ghép nhiều puli. Được minh họa trong hình 4.

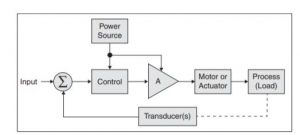
Cơ cấu servo
Một cơ cấu servo là một sự kết hợp của cơ khí và điều khiển phần cứng bằng cách sử dụng các tín hiệu hồi tiếp tác động đến việc điều khiển hệ thống. Tín hiệu hồi tiếp là một dạng của một lỗi hoặc sự khác nhau giữa giá trị thật và giá trị mong muốn. Cơ cấu servo thông thường là hoạt động theo nguyên lý hồi tiếp tiêu cực, tại nơi mà lỗi được loại bỏ khỏi khi được xuất từ ngõ ra. Cơ cấu servo được biết đến là một hệ thống vòng kín. Chúng đã được mô tả trong điều khiển PID và động cơ servo trong cuốn sách này; tuy nhiên, điều quan trọng liên quan đến điều khiển cơ cấu servo không chỉ là vị trí, tốc độ, hay mô-men, nhưng còn là điều khiển giá trị như nhiệt độ, áp suất hoặc bất cứ thứ gì có thể đo đạc được. Một ví dụ cho cơ cấu servo mà không liên quan đến động cơ servo là cơ cấu vận hành thủy lực, là cơ cấu mà tốc độ và vị trí của chúng được điều khiển bởi van dẫn hướng dầu sử dụng tín hiệu hồi tiếp từ cảm biến analog được gắn bên ngoài. Hình 5 sẽ minh họa sơ đồ vật lý của một hệ thống servo.