
♦ Xem thêm kiến thức về điều khiển động cơ bước
- Điều khiển bằng Driver A4988
- Điều khiển bằng L298N | PWM | Mạch Cầu H
- Những kiến thức về động cơ servo mà người làm kỹ thuật phải biết
1/ Động cơ bước là gì?
Động cơ bước (stepper motor) là động cơ không chổi than, thực chất là một động cơ đồng bộ dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay. Loại động cơ này có nhiều cuộn dây bên trong được sắp xếp theo từng nhóm gọi là “pha”. Bằng cách cung cấp năng lượng (nguồn điện) cho từng pha theo từng giai đoạn, động cơ sẽ quay từng bước một. Động cơ này được điều khiển rất chính xác về vị trí và tốc độ, chính vì đặc điểm này, nên động cơ bước được lựa chọn trong nhiều ứng dụng cần đến việc điều khiển chính xác

Để nói thêm về tính chính xác về động cơ bước, chúng ta giả sử chế tạo một con robot với nhiệm vụ gắp một ly cafe để lên bàn. Và đầu tiên sử dụng động cơ thông thường sẽ khó có thể xác định được góc cần quay là bao nhiêu và phản hồi lại góc đó một cách chính xác, bởi để điều khiển được động cơ thông thường một cách chính xác chúng ta cần rất nhiều thông số (điện áp, dòng điện, từ thông, các lực ngoại cảnh,…). Và động cơ bước sinh ra để làm điều đó một cách dễ dàng hơn, thay vì cung cấp một lượng điện năng và cánh tay robot quay, động cơ bước có thể xác định được góc quay của nó nhằm đưa ra độ chính xác cao cho quá trình chuyển động
1.1/ Cấu tạo động cơ bước
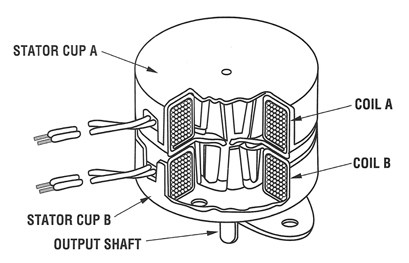
Về cấu tạo động cơ bước gồm có các bộ phận là stato, roto là nam châm vĩnh cửu hoặc trong trường hợp của động cơ biến từ trở là những khối răng làm bằng vật liệu nhẹ có từ tính. Động cơ bước được điều khiển bởi bộ điều khiển bên ngoài. Động cơ bước và bộ điều khiển được thiết kế sao cho động cơ có thể giữ nguyên bất kỳ vị trí cố định nào cũng như quay đến một vị trí bất kỳ nào.
Động cơ bước có thể sử dụng trong hệ thống điều khiển vòng hở đơn giản, hoặc vòng kín, tuy nhiên khi sử dụng động cơ bước trong hệ điều khiển vòng hở khi quá tải, tất cá các giá trị của động cơ đều bị mất và hệ thống cần nhận diện lại.
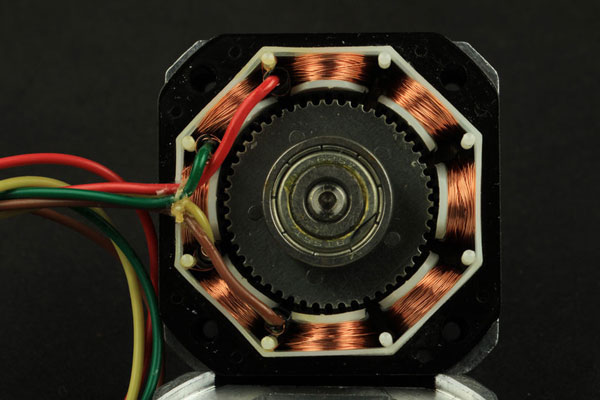
Phần rotor được cấu tạo từ nam châm với 2 điện cực bắc và nam và có hình dạng như các bánh răng. Nếu khó hình dung thì bạn hãy tưởng tượng với hai bàn tay của mình, tay trái là cực bắc và tay phải là cực nam. Khi đặt hai bàn tay chồng lên nhau và xen kẽ các ngón tay với nhau ta được phần rotor của động cơ bước.
Phần stator của động cơ bước được cấu tạo từ các cuộn dây điện, trong ví dụ này sẽ là 4 cuộn dây điện hoạt động theo cặp và có thể đồng thời bật tắt tạo ra từ trường trái dấu theo gặp. Và chúng hoạt động cùng nhau để tạo ra chiều quay cho động cơ bước. Góc quay còn phụ thuộc vào số bánh răng trên rotor và số cuộn nam châm điện ở phần stator
1.2/ Nguyên lý hoạt động
Hãy chia động cơ thành 2 phần trái và phải theo trục động cơ. Khi cấp điện cuộn nam châm bên phải trở thành cực bắc (màu đỏ) còn cuộn nam châm bên trái trở thành cực nam (màu xanh). Làm cho rotor quay một bước và lúc đó một bánh răng có tính cực nam sẽ bắt khớp vào bánh răng của cuộn nam châm bên phải có tính cực bắc. Tương tự với bên trái.
Tiếp đến cuộn nam châm bên dưới sẽ được cấp điện và mang tính cực bắc, cuộn nam châm phía trên sẽ mang tính cực nam. Và cũng như phần đầu, một bánh răng sẽ khớp với bánh răng còn lại của cuộn nam châm. Và như vậy rotor quay được thêm một bước nữa.
Cứ như vậy, các cuộn nam châm dọc và ngang thay phiên nhau bật tắt và các bánh răng của rotor lần lượt khớp với các bánh răng của stator. Tạo nên chuyển động quay theo bước cho động cơ.
1.3/ Đặc điểm của động cơ bước
- Động cơ bước hoạt động dưới tác dụng của các xung rời rạc và kế tiếp nhau. Khi có dòng điện hay điện áp đặt vào cuộn dây phần ứng của động cơ bước làm cho roto của động cơ quay một góc nhất định gọi là bước của động cơ.
- Góc bước là góc quay của trục động cơ tương ứng với một xung điều khiển. Góc bước được xác định dựa vào cấu trúc của động cơ bước và phương pháp điều khiển động cơ bước.
- Tính năng mở máy của động cơ được đặc trưng bởi tần số xung cực đại có thể mở máy mà không làm cho roto mất đồng bộ.
- Chiều quay động cơ bước không phụ thuộc vào chiều dòng điện mà phụ thuộc vào thứ tự cấp xung cho các cuộn dây.
2/ Phân loại động cơ bước
Động cơ bước được chia thành 3 loại chính là:
- Động cơ bước biến từ trở.
- Động cơ bước nam châm vĩnh cửu
- Động cơ bước hỗn hợp/lai.
2.1/ Động cơ bước nam châm vĩnh cửu
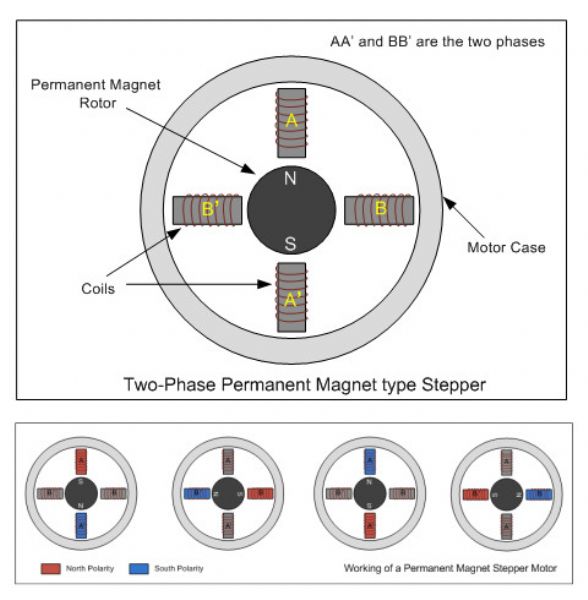
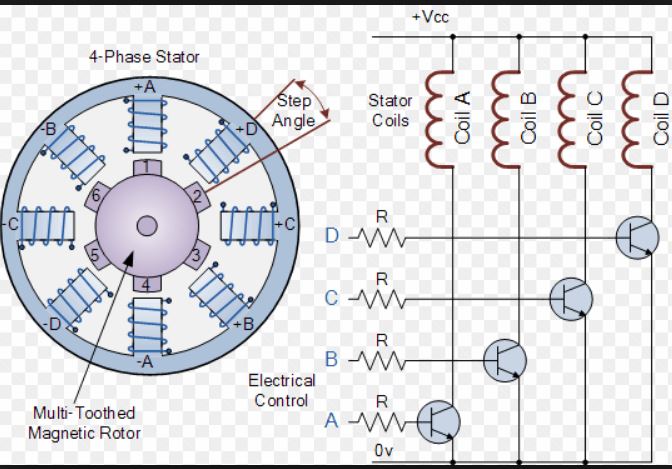
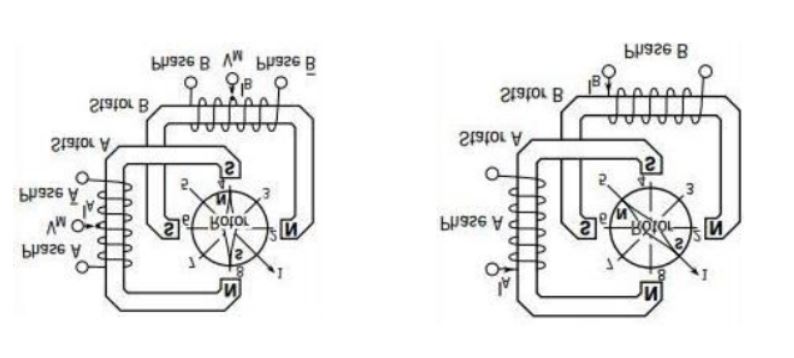
Động cơ bước nam châm vĩnh cửu có roto là nam châm vĩnh cửu, stato có nhiều răng trên mỗi răng có quấn các vòng dây. Các cuộn dây pha có cực tính khác nhau.
Nguyên lý hoạt động của động cơ bước nam châm vĩnh cửu có 2 cặp cuộn pha được trình bày ở hình: Ban đầu vị trí của stato và roto đang ở phase A. Khi cấp điện cho 2 cuộn dây pha B và D trong 2 cuộn sẽ xuất hiện cực tính. Do cực tính của cuộn dây pha và roto ngược nhau dẫn đến roto chuyển động đến vị trí như hình phase B on. Khi cuộn dây pha B và D ngắt điện cuộn dây A và B được cấp điện thì roto lại chuyển động đến vị trí như hình phase C on.
Gọi số răng trên stato là Zs, góc bước của động cơ là Sđc, góc bước của động cơ này được tính theo công thức sau:
2.2/ Động cơ bước biến từ trở
Động cơ bước biến từ trở có cấu tạo giống với động cơ bước nam châm vĩnh cửu. Cấu tạo của stato cũng có các cuộn pha đối xứng nhau, nhưng các cuộn pha đối xứng có cùng cực tính khác với động cơ bước nam châm vĩnh cửu. Góc bước của stato là Ss.
Roto của động cơ bước biến từ trở được cấu tạo từ thép non có khả năng dẫn từ cao, do đó khi động cơ mất điện roto vẫn tiếp tục quay tự do rồi mới dừng hẳn.
Nguyên lý hoạt động của động cơ bước biến từ được thể hiện như hình:
Khi cấp điện cho pha A (hình a), từng cặp cuộn dây A bố trí đối xứng nhau có cùng cực tính là nam (S) và bắc (N). Lúc này các cuộn dây hình thành các vòng từ đối xứng.
Khi cấp điện cho pha B (hình b). Lúc này từ trở trong động cơ lớn, momen từ tác động lên trục roto làm cho roto quay theo chiều giảm từ trở. Roto quay cho tới khi từ trở nhỏ nhất và khi momen bằng không thì trục động cơ dừng, roto đạt đến vị trí cân bằng mới.
Tương tự như vật khi cấp điện cho pha C, động cơ hoạt động theo nguyên tắc trên và roto ở vị trí như hình c. Quá trình trên lặp lại và động cơ quay liên tục theo thứ tự pha A B C. Để động cơ quay ngược chiều chỉ cần cấp điện cho các pha theo thứ tự ngược lại.
Gọi số pha của động cơ là Np, ổ răng trên roto là Zr, góc bước của động cơ bước biến từ trở là S ta tính được công thức sau:
2.3/ Động cơ bước hỗn hợp
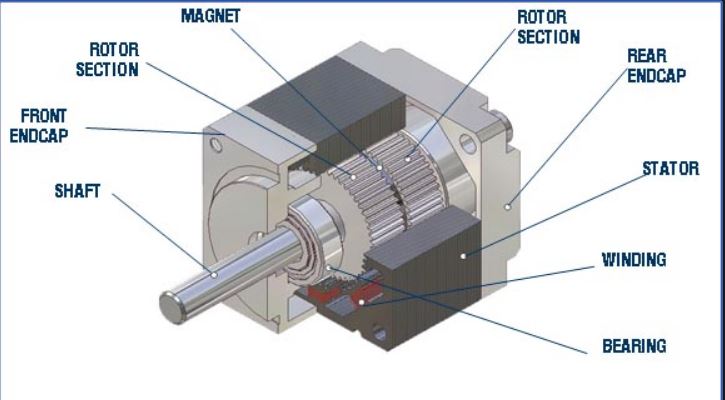
Động cơ bước hỗn hợp (còn gọi là động ơ bước lai) có đặc trưng cấu trúc của động cơ bước nam châm vĩnh cửu và động cơ bước biến từ. Stato và roto có cấu tạo tương tự động cơ bước biến từ trở nhưng số răng của stato và roto không bằng nhau. Roto của động cơ bước thường có 2 phần: phần trong là nam châm vĩnh cửu được gắn chặt lên trục động cơ, phần ngoài là 2 đoạn roto được chế tạo từ lá thép non và răng của 2 đoạn roto được đặt lệch nhau.
Góc bước của động cơ bước hỗn hợp được tính theo công thức:
Trong đó:
- S là góc bước của động cơ
- Sr là góc giữa 2 răng kề nhau
- Zs là số cặp cực trên stato.
Động cơ bước hỗn hợp được sử dụng rộng rãi vì kết hợp các ưu điểm của 2 loại động cơ trên là động cơ bước nam châm vĩnh cửu và động cơ bước biến từ trở.
2.3/ Động cơ bước 2 pha
Hiện nay các động cơ bước 2 pha được sử dụng rất thông dụng, có kết cấu như động cơ bước hỗn hợp và động cơ bước nam châm vĩnh cửu. Tuy nhiên động cơ bước 2 pha còn được phân loại dựa vào cách đấu dây các cặp cực.
Động cơ bước đơn cực: cuộn dây pha có ba dây đầu ra. Điểm trung tâm của cuộn dây được đấu ra ngoài. Khi cấp điện, dây trung tâm được nối với đầu dương của nguồn điện, hai đầu dây còn lại được nối với đầu âm.
Động cơ bước lưỡng cực: cuộn dây pha của loại động cơ này chỉ có 2 đầu ra. Một đầu dây được nối với nguồn dương và đầu còn lại được nối với đầu âm của nguồn điện. Động cơ bước lưỡng cực có kết cấu đơn giản nhưng điều khiển phức tạp hơn động cơ bước đơn cực.
3/ Phương pháp điều khiển động cơ bước
Hiện nay có 4 phương pháp điều khiển động cơ bước.
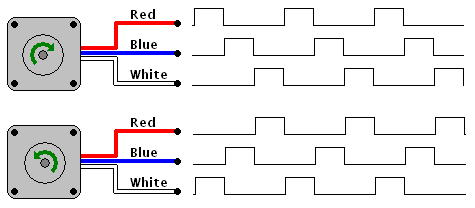
- Điều khiển dạng sóng (Wave): là phương pháp điều khiển cấp xung điều khiển lần lượt theo thứ tự chon từng cuộn dây pha.
- Điều khiển bước đủ (Full step): là phương pháp điều khiển cấp xung đồng thời cho 2 cuộn dây pha kế tiếp nhau.
- Điều khiển nửa bước (Half step): là phương pháp điều khiển kết hợp cả 2 phương pháp đều khiển dạng sóng và điều khiển bước đủ. Khi điều khiển theo phương pháp này thì giá trị góc bước nhỏ hơn hai lần và số bước của động cơ bước tăng lên 2 lần so với phương pháp điều khiển bước đủ tuy nhiên phương pháp này có bộ phát xung điều khiển phức tạp.
- Điều khiển vi bước (Microstep): là phương pháp mới được áp dụng trong việc điều khiển động cơ bước cho phép động cơ bước dừng và định vị tại vị trí nửa bước giữa 2 bước đủ. Ưu điểm của phương pháp này là động cơ có thể hoạt động với góc bước nhỏ,độ chính xác cao. Do xung cấp có dạng sóng nên động cơ hoạt động êm hơn,hạn chế được vấn đề cộng hưởng khi động cơ hoạt động.
4/ Các thiết bị đi kèm với động cơ bước
4.1/ Hộp giảm tốc
Hộp giảm tốc sử dụng cho động cơ bước là loại hệ bánh răng hành tinh. đảm bảo độ chính xác và bền, tỉ lệ giảm tốc: 1:5, 1:10, 1:20,….. Hộp giảm tốc được chế tạo phù hợp theo từng loại động cơ bước 130, 110, 86, 57, 42 thường dùng trong robot hoặc các loại máy gia công. Lý do bộ truyền bánh răng hành tinh được sử dụng vì có thể truyền tải được momen xoắn, chính xác, chịu được rung lắc, chịu được giật do đảo chiều và thay đổi tốc độ liên tục.

4.2/ Phanh từ
Phanh từ là thiết bị được lắp ở phần đuôi động cơ bước, đây là thiết bị được dùng để dừng động cơ đột ngột hoặc tự giữ trong trường hợp mất điện. Phanh từ sẽ tự động mở ra khi được cấp điện và khi không có điện phanh từ sẽ đóng lại khoá cứng trục

4.3/ Encoder
Đây là một thiết bị được gắng ở phần đuôi động cơ cơ, có chức năng hồi tiếp tín hiệu về driver điều khiển hoặc PLC. Từ đó driver sẽ cấp đúng số xung. Loại động cơ được gắng encoder sẽ chuyển động với tốc độ cao, chính xác và không bị mất bước trong quá trình hoạt động
Loại động cơ step được gắng encoder thường được gọi tên là động cơ hybrid (động cơ lai). để điều khiển động cơ này cũng cần phải sử dụng driver riêng biệt (có các cổng nhận tín hiệu hồi tiếp encoder)


4.4/ Driver điều khiển
Để điều khiển động cơ bước cần phải có driver. Đây là thiết bị cấp xung cho động cơ hoạt động, ứng với từng loại động cơ sẽ có loại driver tương ứng. Hiệu suất hoạt động của motor bước được quyết định bởi driver. Các bộ driver cấp xung mịn và chính xác giúp động cơ hoạt động hiệu quả hơn, êm hơn


5/ Những ưu và nhược điểm của động cơ bước
Lý do để bạn chọn sử dụng động cơ bước là vì khả năng điều khiển chính xác của nó với một góc quay được xác định. Nhưng cũng có một vài hạn chế, động cơ bước đôi khi khá giật vì mỗi mẫn quay và dừng tạo ra xung đột, chắc chắn điều này bạn sẽ không mong muốn khi gắn lên một cánh tay robot đòi hỏi độ chính xác cao. Giải pháp cho việc chống giật là sử dụng một loại động cơ tên là servo, nó được điều khiển trơn tru hơn, và có cơ chế phản hồi tích hợp. Nói một cách đơn giản là tích hợp encoder để phản hồi. Động cơ servo có cấu tạo phức tạp hơn nên cũng đắt hơn.
5.1/ Ưu điểm
– Định vị: Bởi vì động cơ bước quay theo các bước lắp lại với độ chính xác cao, nên được ứng dụng trong các yêu cầu vị trí chính xác: máy in 3D, CNC, Camera quay phim, các máy móc chuyển động hệ XY. Một số ổ đĩa cũng sử dụng động cơ bước để định vị đầu đọc/ghi
– Điều khiển tốc độ: Động cơ điều khiển tốc độ quay trong các hệ thống tự tự động hoá và robotics
– Momen ở tốc độ thấp: Các loại động cơ DC thông thường không có momen lớn khi quay ở tốc độ thấp. Nhưng đối với động cơ bước thì momen xoắn đạt cực đại ở tốc độ thấp, đây là một lựa chọn tốt cho các ứng dụng yêu cầu tốc độ thấp và độ chính xác cao
5.2/ Nhược điểm
– Hiệu quả thấp: Không giống như động cơ DC, động cơ bước tiêu thụ điện không bị phụ thuộc vào tải. Khi động cơ không hoạt động, nó vẫn tiêu thụ điện. Bởi vì điều này, nên động cơ sẽ bị nóng
– Bị hạn chế về momen khi chạy ở tốc độ cao: Trong thực tế, động cơ bước sẽ có momen xoắn khi quay tốc độ cao thấp hơn so với khi quay ở tốc độ thấp. Một số loại động cơ bước được tối ưu về hiệu năng khi quay ở tốc độ cao, nhưng cần phải tốn chi phí cho driver thích hợp.
– Không có hồi tiếp tín hiệu: Không giống như động cơ servo, hầu hết các loại động cơ bước không được tích hợp hồi tiếp tín hiệu vị trí. Mặc dù khi chạy ở “open-loop” (vòng hở) có thể đạt được độ chính xác cao. Cảm biến hành trình hoặc điểm HOME thường được yêu cầu để đảm bảo an toàn và thiết lập tham chiếu vị trí

Cám ơn đã cung cấp.