Trong hướng dẫn này, chúng ta sẽ tìm hiểu cách tạo Bộ điều khiển tốc độ động cơ PWM DC bằng cách sử dụng IC 555. Chúng tôi sẽ hướng dẫn chi tiết cách thức hoạt động của mạch tạo bộ định thời 555, cách sử dụng nó để kiểm soát tốc độ của động cơ DC và cách tạo PCB tùy chỉnh cho nó.
Tổng quan
Chúng ta có thể điều khiển tốc độ của động cơ DC bằng cách điều khiển điện áp đầu vào của động cơ. Với mục đích đó, chúng ta có thể sử dụng PWM, hoặc điều chế độ rộng xung.

Điều khiển tốc độ động cơ PWM DC
Điều khiển tốc độ động cơ PWM DC
PWM là phương pháp mà qua đó chúng ta có thể tạo ra điện áp thay đổi bằng cách bật và tắt nguồn điện đến thiết bị điện tử với tốc độ nhanh. Điện áp trung bình phụ thuộc vào chu kỳ làm việc của tín hiệu hoặc lượng thời gian tín hiệu BẬT so với lượng thời gian tín hiệu TẮT trong một khoảng thời gian quy định.
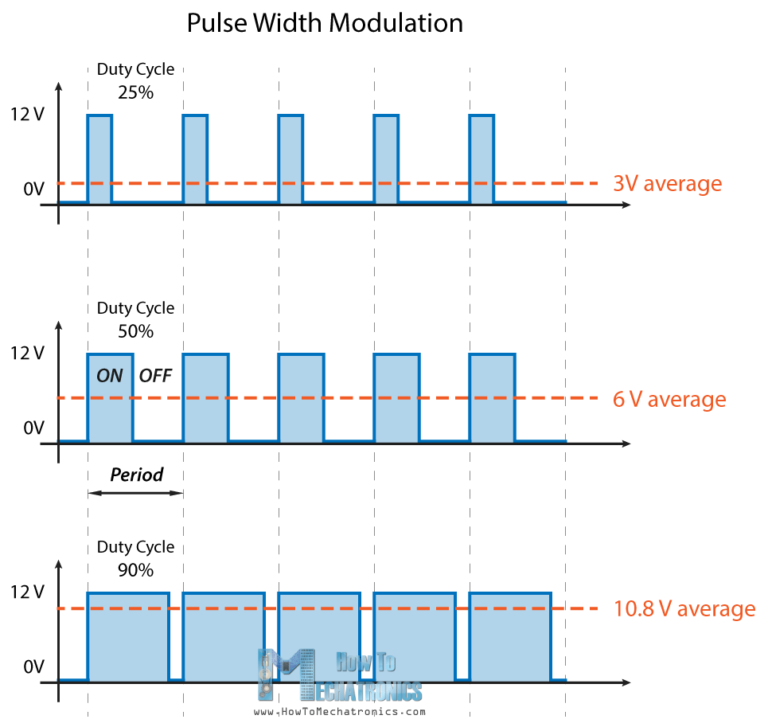
Nguyên lý làm việc của PWM – Điều chế độ rộng xung Cách thức hoạt động
Mạch tạo mạch PWM 555
IC 555 có khả năng tạo tín hiệu PWM khi được thiết lập ở chế độ astable.
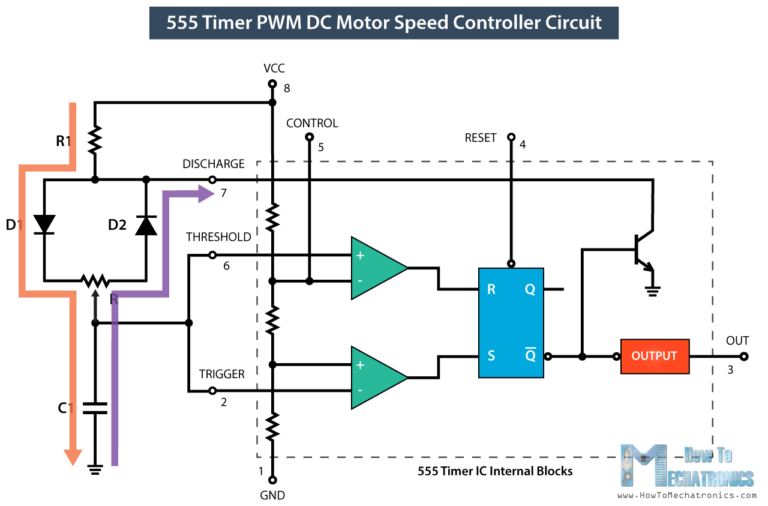
Đây là một mạch cơ bản của IC 555 hoạt động ở chế độ astable và chúng ta có thể nhận thấy rằng đầu ra ở mức CAO khi tụ C1 đang nạp qua các điện trở R1 và R2.
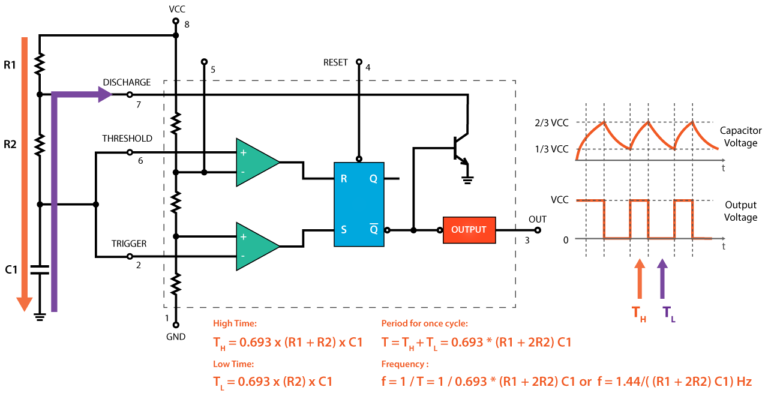
Mặt khác, đầu ra của IC ở mức THẤP khi tụ điện C1 xả nhưng chỉ qua điện trở R2. Vì vậy, chúng ta có thể nhận thấy rằng nếu chúng ta thay đổi giá trị của bất kỳ thành phần nào trong ba thành phần này, chúng ta sẽ có thời gian BẬT và TẮT khác nhau hoặc chu kỳ khác nhau của tín hiệu đầu ra dạng sóng vuông. Một cách dễ dàng và tức thời để làm điều này là thay thế điện trở R2 bằng một biến trở và thêm hai điốt trong mạch.
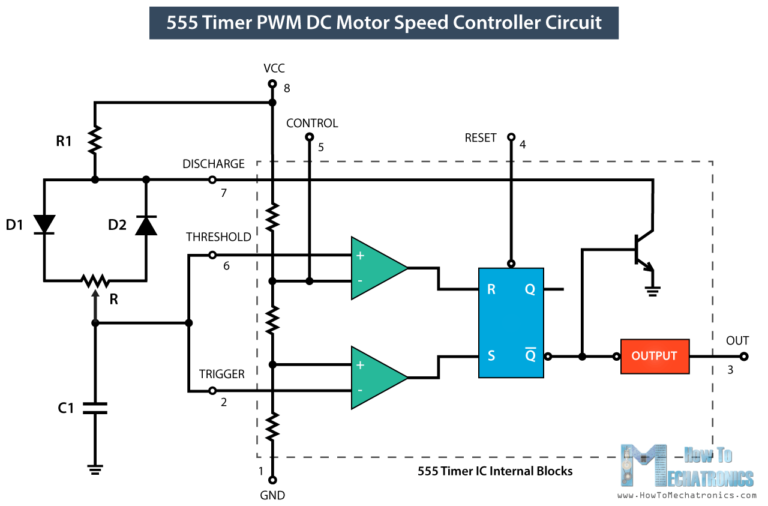
Trong cấu hình này, thời gian Bật sẽ phụ thuộc vào điện trở R1, bên trái của biến trở và tụ C1, trong khi thời gian Tắt sẽ phụ thuộc vào tụ C1 và bên phải của biến trở. Chúng ta cũng có thể nhận thấy rằng trong cấu hình này, chu kỳ của một chu kỳ, do đó tần số, sẽ luôn giống nhau, bởi vì tổng trở, trong khi nạp và xả, sẽ giữ nguyên.
Thông thường điện trở R1 nhỏ hơn nhiều so với điện trở của biến trở, ví dụ, 1K so với 100K của biến trở. Bằng cách đó, có thể điều khiển 99% điện trở nạp và xả trong mạch. Chân điều khiển của IC 555 không được sử dụng nhưng nó được kết nối với tụ điện 100nF để loại bỏ bất kỳ nhiễu bên ngoài nào từ chân đó. Thiết lập lại, chân số 4, hoạt động ở mức thấp, do đó, nó được kết nối với VCC để ngăn chặn bất kỳ thiết lập lại không mong muốn nào của đầu ra.
Đầu ra của IC 555 có thể để trống hoặc cấp dòng điện 200mA cho tải. Vì vậy, nếu động cơ mà chúng ta muốn điều khiển vượt quá định mức này, chúng ta cần sử dụng transistor hoặc MOSFET để điều khiển động cơ. Trong ví dụ này, tôi đã sử dụng một transistor Darlington (TIP122) có thể xử lý dòng điện lên tới 5A.
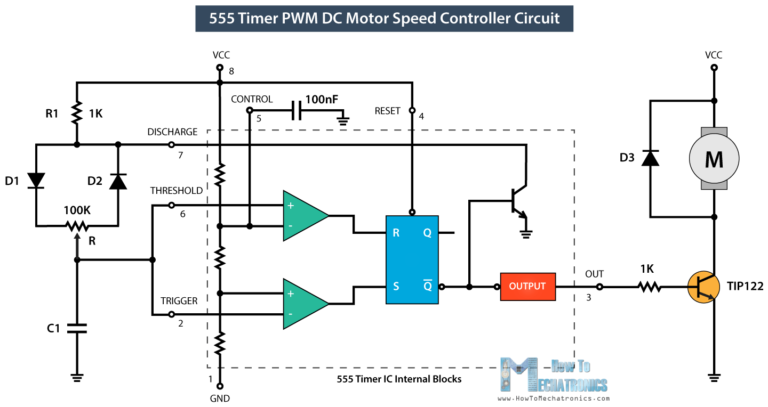
Đầu ra của IC cần được kết nối với chân của transistor thông qua một điện trở, và trong trường hợp của tôi, tôi đã sử dụng điện trở 1k. Để ngăn chặn bất kỳ sự biến đổi điện áp nào được tạo ra bởi động cơ, chúng ta cần sử dụng một diode flyback được kết nối song song với động cơ.
Thiết kế PCB cho Bộ điều khiển tốc độ động cơ PWM DC
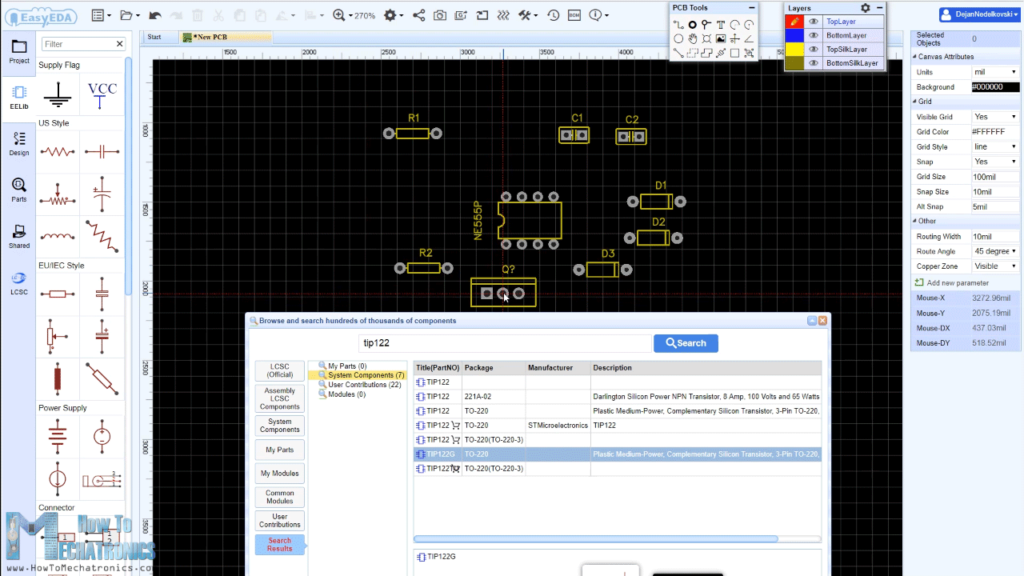
Bây giờ chúng ta sẽ tới phần chính là thiết kế một PCB tùy chỉnh cho mạch này. Với mục đích đó, tôi sẽ sử dụng phần mềm trực tuyến miễn phí EasyEDA. Ở đây chúng ta có thể bắt đầu bằng cách tìm kiếm và đặt các linh kiện trên màn hình chính. Thư viện có hàng trăm ngàn linh kiện, vì vậy tôi không gặp vấn đề gì khi tìm tất cả các linh kiện cần thiết cho mạch Bộ điều khiển tốc độ động cơ PWM DC này.
Sau khi chèn các linh kiện, chúng ta cần tạo board phác thảo và bắt đầu sắp xếp các linh kiện. Hai tụ điện nên được đặt càng gần càng tốt với IC 555, trong khi các linh kiện khác có thể được đặt ở bất cứ đâu chúng ta muốn, nhưng vẫn được sắp xếp hợp lý theo sơ đồ mạch.
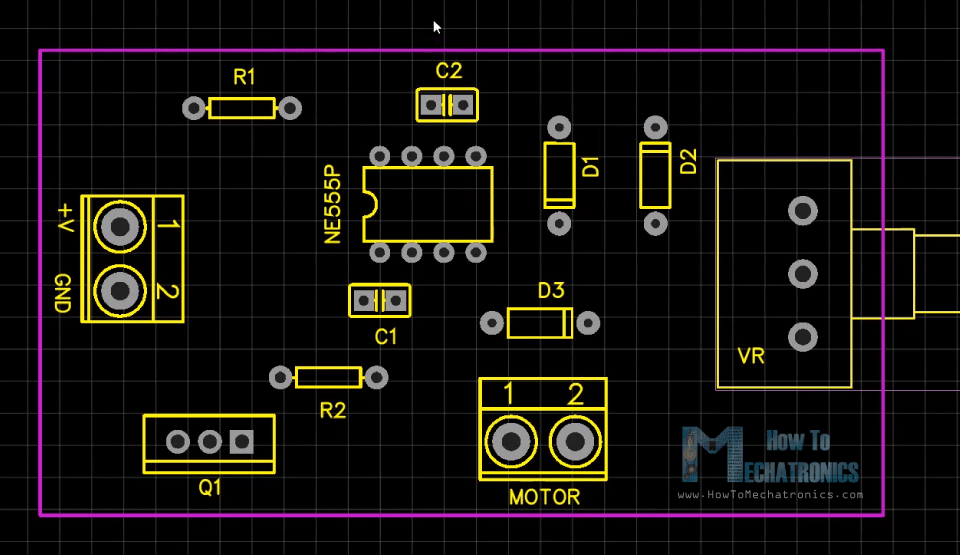
Sử dụng công cụ nối dây để kết nối tất cả các linh kiện. Công cụ theo dõi khá trực quan và dễ làm việc. Chúng ta có thể sử dụng cả 2 mặt của board để tránh trùng dây và thu nhỏ diện tích board.
![]()
Công cụ nối dây EasyEDA
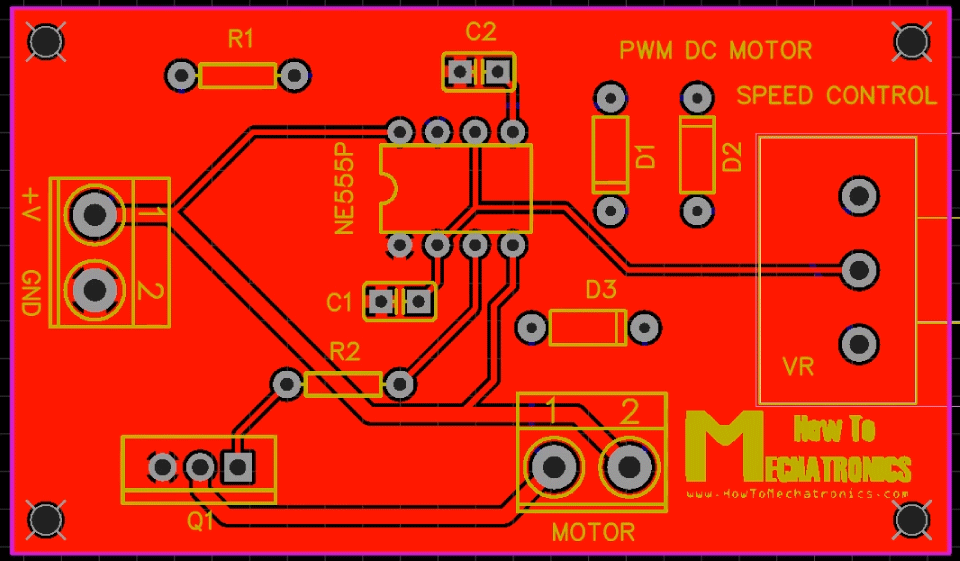
Các chân cắm của các linh kiện cần được kết nối với Groud được đặt thành Groud thông qua tab Pad Properties, trong đó chúng ta cần nhập GND vào nhãn Net khi chọn chân cắm.
Chúng ta có thể sử dụng lớp Silk để thêm văn bản vào board. Ngoài ra chúng ta có thể chèn một tệp hình ảnh, vì vậy tôi thêm một hình ảnh logo trang web của tôi sẽ được in trên board. Cuối cùng, sử dụng công cụ diện tích đồng, chúng ta cần tạo diện tích của PCB.
Thiết bị PCB điều khiển tốc độ bộ định thời 555
Bạn có thể tìm thấy các tệp dự án EasyEDA của dự án này tại đây.
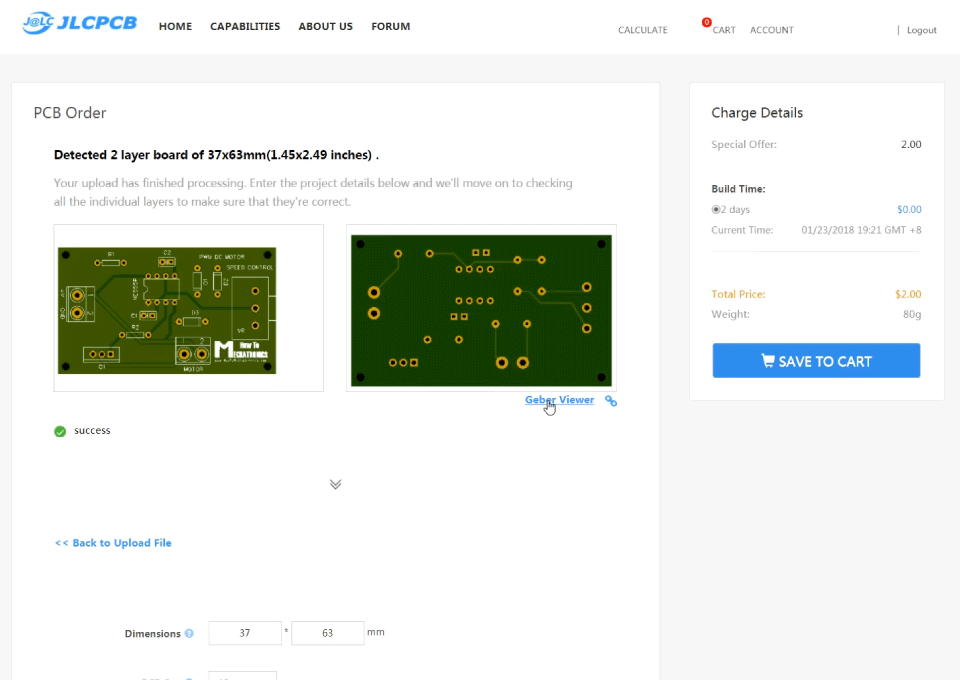
Khi chúng ta đã hoàn thành thiết kế, chúng ta chỉ cần nhấp vào nút “Gerber output”, lưu dự án và chúng ta sẽ có thể tải xuống các tệp Gerber được sử dụng để tạo PCB. Chúng ta có thể đặt hàng PCB từ JLCPCB, dịch vụ chế tạo PCB của EasyEDA.
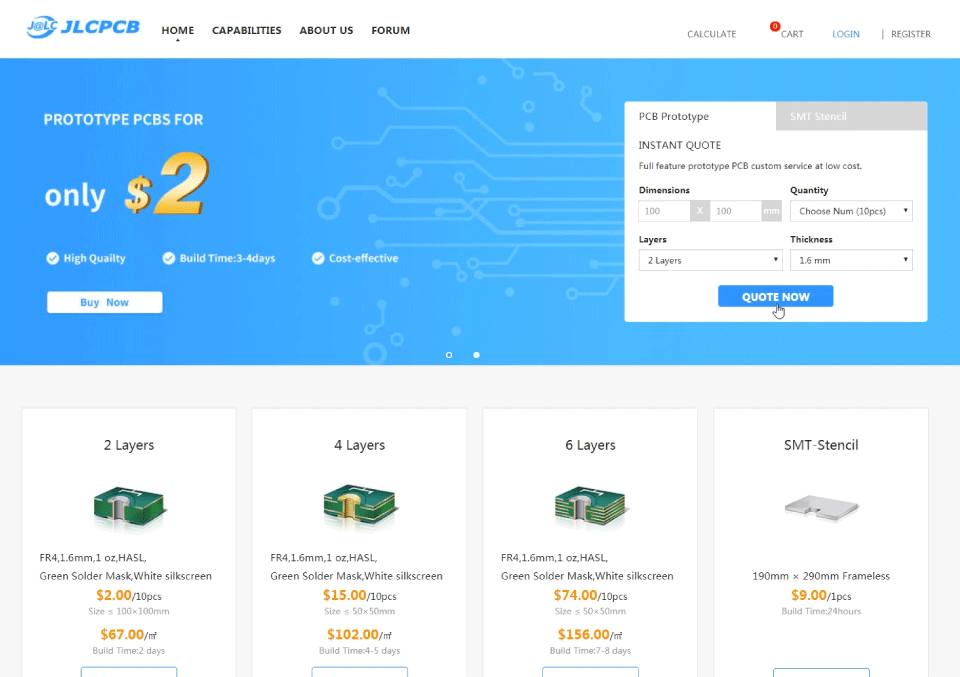
Ở đây chúng ta chỉ cần kéo và thả tệp zip đã tải lên của các tệp gerber. Sau khi tải lên, chúng ta có thể một lần nữa xem lại PCB trong trình xem Gerber. Nếu mọi thứ đều ổn, chúng tôi có thể chọn tối đa 10 PCB và mua chúng chỉ với 2 đô la.
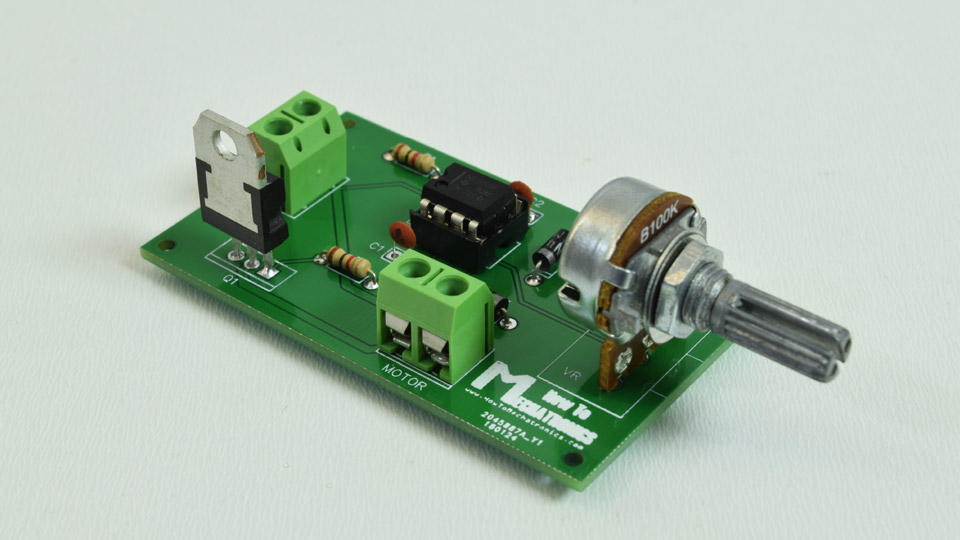
Lắp ráp bộ điều khiển tốc độ động cơ PWM DC PCB
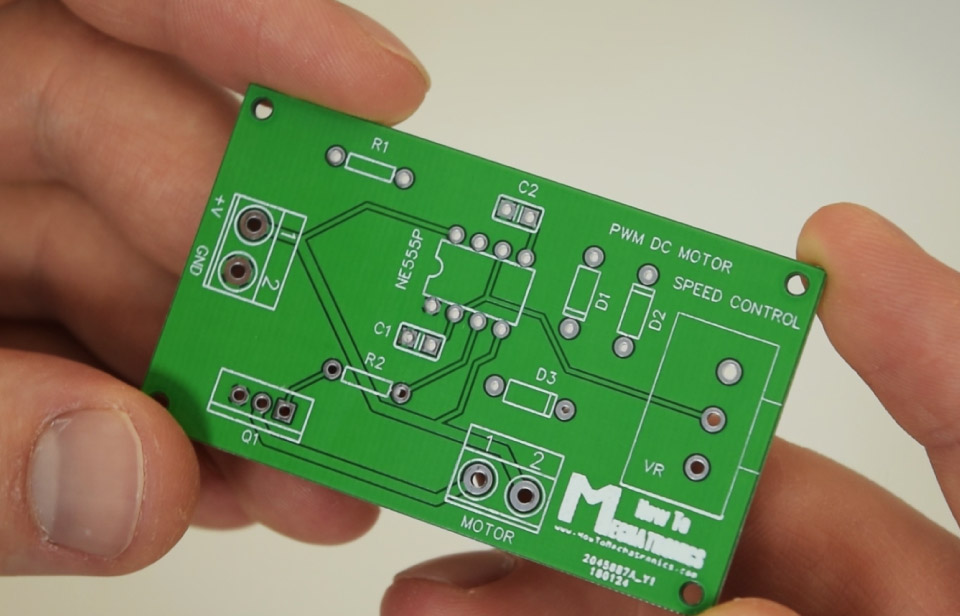
Sau một tuần, PCB đã được giao và tôi phải thừa nhận rằng tôi khá hài lòng khi có thiết kế PCB của riêng mình được sản xuất. Chất lượng PCB là tuyệt vời và mọi thứ giống hệt như trong thiết kế.
Ok, vậy bây giờ chúng ta có thể chuyển sang lắp ráp các linh kiện lên PCB.
Các linh kiện cần thiết:
- NE555P hẹn giờ IC
- R1 = R2 = 1k Ohm
- C1 = C2 = 100nF
- D1 = D2 = D3 = 1N4004
- Biến trở = 100k Ohm
- Transitor – Darlington TIP122
- 2 Đầu cắm
Đầu tiên tôi lắp các linh kiện nhỏ, điện trở, điốt và tụ điện.
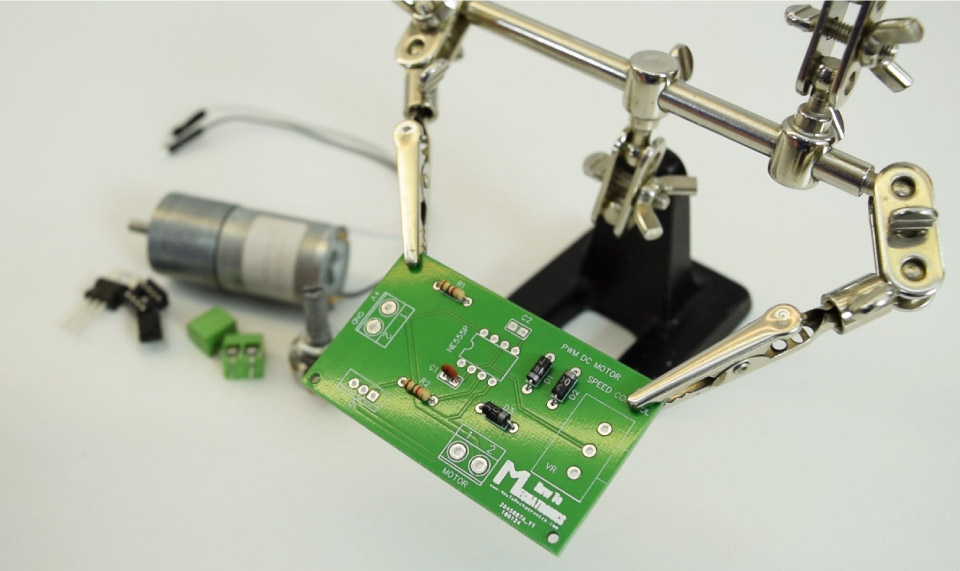
Tôi bẻ cong đầu của chúng ở phía bên kia để giữ nguyên vị trí khi tôi lật board để hàn. Đối với các linh kiện lớn hơn, tôi đã sử dụng kẹp để giữ chúng đúng vị trí khi lật board.
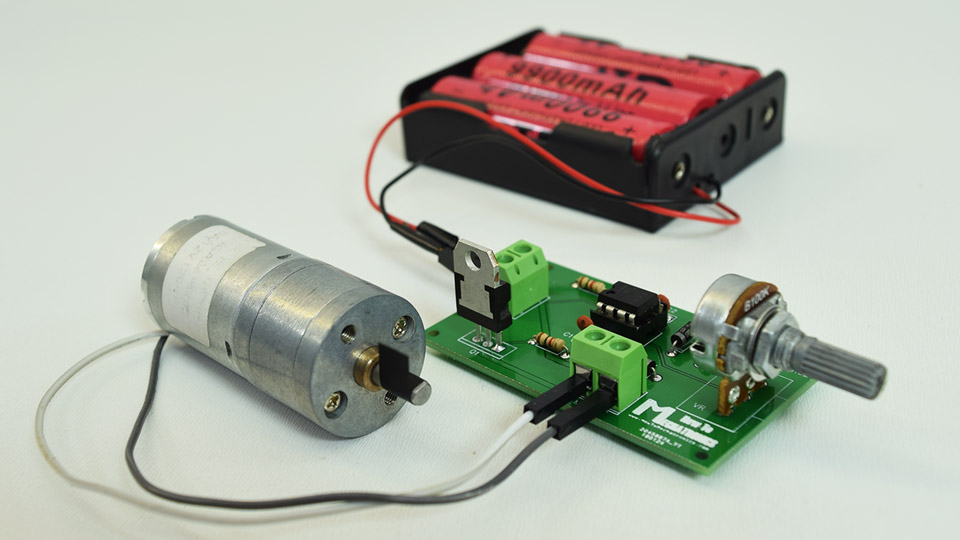
Đây là board hoàn chỉnh và những gì còn lại bây giờ là kết nối một động cơ DC và nguồn điện phù hợp cho nó.
Tôi đã sử dụng động cơ DC 12 V và bộ nguồn pin Li-ion 3.7V được kết nối nối tiếp, cung cấp khoảng 12V. Bây giờ bằng cách sử dụng biến trở, chúng ta có thể điều khiển tốc độ của động cơ DC hoặc tín hiệu PWM được tạo ra bởi IC 555.
Dịch từ: https://howtomechatronics.com/how-it-works/electronics/how-to-make-pwm-dc-motor-speed-controller-using-555-timer-ic/

Cho em xin code
đầu vào với điện áp DC 90v thì phải làm sao ạ , chỉ cho em với ạ