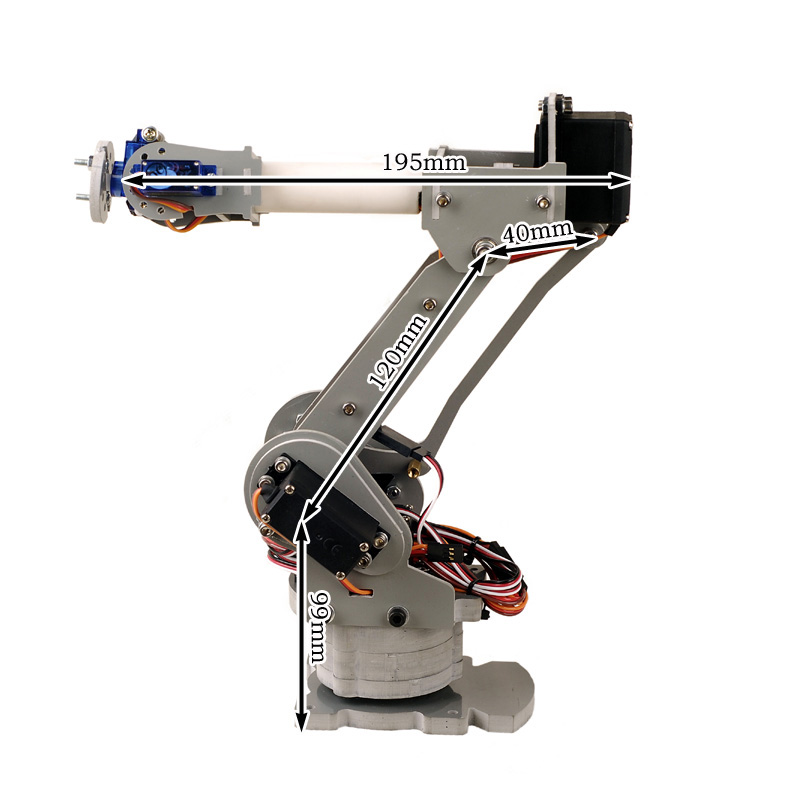




Cánh tay robot 6 bậc tự do RDG
Sản phầm sử dụng:
- 6 cái servo: 4 cái MG996 và 2 cái SG90
- Arduino uno r3, nguồn cung cấp điện
- Phần nhựa gia công cơ khí CNC

Lưu Ý:
- Nó không thể gấp vật.
- Nó không thể hoạt động liên tục trong thời gian dài.
- Nguyên tắc làm việc của trục xoay, góc xoay trong quá trình tìm kiếm mục tiêu ở trạng thái chờ, dòng điện lớn dễ dàng gia nhiệt, tích lũy nhiệt sẽ làm cháy servo, nếu chuyển động không dừng lại và làm việc liên tục hơn 10 giờ nó sẽ làm cháy servo, mô phỏng thực tế của quá trình xử lý, vị trí và quá trình nâng/ hạ là để cho phép các bộ phận còn lại cánh tay, trong thời gian này có thể làm mát servo.
- Đừng để các cánh tay lớn và nhỏ xác lại với nhau, khi di chuyển cùng lúc trục xoay, tay điều khiển chính và tay ngang, nó chỉ hoạt động tối đa 3,5 phút trước khi làm cháy servo.
Q & A:
Mô hình cánh tay robot sáu trục sử dụng để làm gì?
Mô hình thao tác này của ABB 6 DOF Robot Arm là một mô hình quy mô có thể được điều khiển bởi các chuyển động thao tác thực tế NC để thí nghiệm, tập trung vào cách hoạt động, không có khả năng thực hiện công việc thực tế.
Vật liệu của phần vỏ là vật liệu nào?
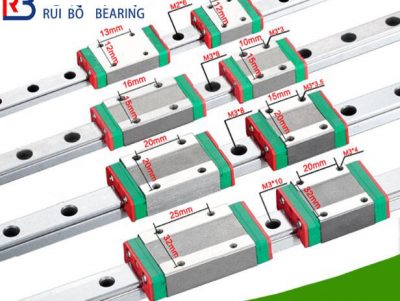
Mô hình sử dụng khung là nhựa PVC, được gia công bằng CNC. Các khớp nối trong cánh tay áp dụng mô-men xoắn giúp tay điều khiển không bị biến dạng. Một ưu điểm khác là độ dẻo của vật liệu phù hợp kết nối để tăng độ chính xác của kết cấu, cơ khí, kết nối với vòng bi chất lượng cao.
Cánh tay robot sáu trục có sáu bậc tự do được gọi là 6 DOF hoạt động tương tự với Scara, giới hạn góc mỗi trục là bao nhiêu?
Thao tác sáu bậc tự do sử dụng các servo có góc xoay 0-180 độ (0 đến 180 độ là giá trị lý thuyết, góc thực tế từ 5 đến 175 độ)
Độ chính xác của cánh tay robot là bao nhiêu?
Bởi vì mô hình mô phỏng sản phẩm công nghiệp với trục xoay, tay điều khiển dùng cho mục đích sử dụng nội bộ có bánh răng giảm tốc thông thường 4mm, chỉ thích hợp cho việc nghiên cứu và điều khiển, không phù hợp với dây chuyền sản xuất công nghiệp.
Nó là một cánh tay lắp ráp sẵn?
Cánh tay được lắp ráp, kiểm tra và đóng gói, bạn sẽ nhận được một cánh tay lắp ráp hoàn thiện. Công ty sẽ lập trình và quay video sản phẩm hoạt động cho bạn trước khi giao hàng, nếu bạn cần nó để thực hiện các hành động khác nhau, chỉ cần lập trình lại.
Danh sách các bộ phận của sản phẩm
- Bộ khung cánh tay robot sáu trục (lắp ráp bao gồm servo)
- arduino uno r3 * 1 bảng mở rộng arduino cảm biến shield v5.0 * 1
- Nguồn 5V-4A 1 * Trang bị thêm vít dự phòng * 1 gói
- Sản phẩm sẽ hoạt động ngay sau khi nó được cung cấp nguồn điện và được lập trình trước, bạn có thể kiểm tra sản phẩm trước thông qua video.
Làm thế nào để điều khiển sáu trục hoặc Scara?
Sử dụng Arduino, là bộ vi xử lý điều khiển chính, nó kết nối với máy tính thông qua phần mềm arduino ide trong ngôn ngữ lập trình C để chỉnh sửa hành động cánh tay, tải lên board Arduino qua cáp USB, vi điều khiển arduino có thể cố định trên cánh tay robot để điều khiển không cần máy tính để hoàn thành hành động. (Cung cấp hướng dẫn arduino và code ví dụ).
Code ví dụ điều khiển tương tự như điều khiển chế độ dạy học, cánh tay robot điều khiển bằng máy tính để di chuyển đường dẫn của các điểm chính, ghi lại từng góc trục và sau đó chỉnh sửa giá trị góc để hướng dẫn, dạy để đạt được một mẫu tương tự.
Nếu bạn sử dụng để thực hiện thử nghiệm ngược lại, bạn có thể cung cấp mã tham chiếu.
Nếu bạn chưa rõ về Arduino nó thể tham khảo sách và khóa học tại đây.
Cánh tay robot sáu trục
Sử dụng khớp nối và servo bên trong để đỡ những phần rất lớn còn lại, trong trục điều khiển chính cũng có vòng bi giữa hai trục quay chính xác với ba rãnh hình chữ V. đầu nối đồng trục.
Dây của servo và của cánh tay đặt bên trong lõi cánh tay nối đến bảng điều khiển. Rất nhiều cánh tay được lắp ráp với ốc vít bằng thép không gỉ chất lượng và cho sản phẩm bền, đẹp.
So sánh RDG6 DOF & RDG460


1, Cánh tay 6 bậc tự do và 4 bậc tự do
2, RDG460 mạnh hơn so với cánh tay sáu trục, bất lợi là RDG460 không thể đạt được một số góc như cánh tay 4 trục, ví dụ nghiêng vào bề mặt của vật liệu. Lợi thế của cánh tay 6 trục là nó có thể làm việc ở nhiều góc độ hơn, vì cấu trúc phức tạp của chúng, khả năng chịu lức của nó có thể truyền sẽ ít hơn.
3, Mô hình thao túng chủ yếu được sử dụng để tìm hiểu các ứng dụng thực tế.
RDG460 dành cho việc xếp pallet
Ứng dụng cánh tay robot 6 trục RDG rộng rãi hơn: hàn, sơn, lắp ráp, chà nhám.