Bạn có biết rằng robot đã được phát minh tại USA và phát triển tại Nhật ?
Robot công nghiệp đầu tiên ở Nhật Bản đã được tạo ra cách đây hơn nửa thế kỷ. Vào năm 1968, Kawasaki Heavy Industrial, hay Kawasaki đã kí một thỏa thuận về bản quyền kĩ thuật với một công ty mang tên Unimation của Mĩ và bắt đầu sản xuất robot tại Nhật Bản. Robot công nghiệp đầu tiên của Nhật Bản được sản xuất trong nước, “Kawasaki-Unimate 2000” đã được hoàn thành vào năm 1969.
Kể từ đó, sự phát triển của robot công nghiệp tại Nhật đã tăng tốc, với trọng tâm nằm ở ngành công nghiệp Ô tô. Kawasaki đã trở thành một công ty sản xuất robot công nghiệp lớn, chiếm thị phần lớn trên toàn cầu và tạo dựng nền tảng để Nhật trở thành “Vương quốc của Robot”. Sẽ không sai nếu chúng ta nói rằng: Robot đã được khai sinh tại Mĩ nhưng lại thực sự phát triển tại Nhật Bản.
Robot công nghiệp được chia ra làm 6 loại chính:
Robot công nghiệp không chỉ được sử dụng trong ngành công nghiệp ô tô mà còn được sử dụng trong nhiều lĩnh vực khác như công nghiệp điện & điện tử và công nghiệp thực phẩm. Chúng được sử dụng cho nhiều mục đích khác nhau bao gồm hàn, sơn, lắp ráp, xử lý vật liệu và xếp dỡ,… và để thích ứng với từng hoạt động, những robot này được chia ra nhiều loại khác nhau.
Mặc dù chúng được sử dụng rộng rãi trong nhiều lĩnh vực và có nhiều loại, nhưng bạn có biết rằng robot công nghiệp thực sự chỉ được phân loại thành 6 loại chính? Hãy cùng xem kĩ hơn về các loại robot công nghiệp này.
- Sự khác biệt thật sự giữa các loại robot khác nhau nằm ở loại khớp và cấu trúc cơ khí của chúng.
Có nhiều cách khác nhau để phân loại robot công nghiệp, chẳng hạn như theo hoạt động, chức năng hoặc kích thước. Tuy nhiên, ở đây chúng ta sẽ tập trung vào phân loại bằng loại khớp và cấu trúc cơ khí của robot.
Có nhiều điểm tương đồng giữa “khớp” của robot và con người, nhưng cũng có những điểm khác biệt. Động cơ thường được sử dụng trong các khớp của robot, nhưng nó không chỉ có các khớp quay chuyển động như cổ tay và khuỷu tay của con người, Các khớp tuyến tính di chuyển kéo dài về phía trước, phía sau, lên và xuống cũng được sử dụng trong robot.
- Trục đối với Robot cũng giống như khớp đối với con người vậy.
Vì cánh tay của con người không thể mở rộng, nên việc sử dụng từ “khớp” nghe có vẻ kỳ quặc. Nhưng đối với robot, cả khớp quay và khớp tuyến tính đều được tính là một khớp. Số lượng khớp được mô tả bằng số “trục” hoặc “bậc tự do (DOF)”. Đối với một robot có năm khớp, chúng ta có thể nói nó là robot 5 trục hoặc có năm bậc tự do (5DoF). Số lượng khớp nối là một trong những điểm quan trọng khi đánh giá robot.
Công cụ sản xuất (thiết bị hiệu ứng cuối), được hiểu là những công cụ gia công như tay gắp, đầu hàn,…, chúng thường được gắn ở khâu cuối cùng của Robot. Robot sẽ di chuyển những công cụ sản xuất trên để thực hiện các công việc. nhưng kể từ khi robot xuất hiện trục thứ 3, ba hoặc nhiều khớp đã xuất hiện trên robot công nghiệp và chúng cho phép robot di chuyển công cụ đến bất cứ nơi nào trong không gian làm việc. Hơn nữa, nếu công cụ sản xuất phải thay đổi được các góc làm việc thì ít nhất cánh tay robot phải có 6 khớp.
Tùy thuộc vào cách các cánh tay robot được định vị, robot được chia thành 6 loại sau đây:
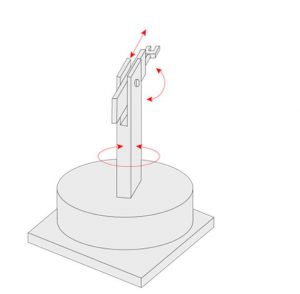
Robot tọa độ cực (Polar coordinate robot): Robot công nghiệp nguyên bản.
Đây kà robot có trục quay ở giữa, giống như một trụ súng và một cánh tay có thể mở rộng. Với các cánh tay được thiết kế để vươn ra khu vực xung quanh, robot này đã được sử dụng rộng rãi trong những ngày đầu phát triển robot. Kawasaki-Unimate 2000 nói trên cũng thuộc loại này.
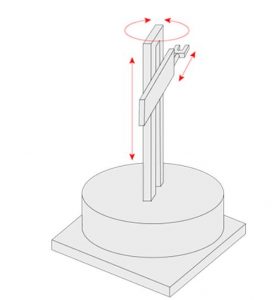
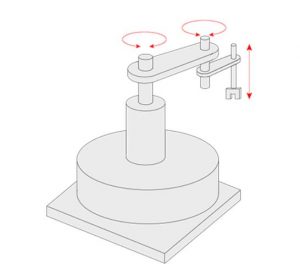
Robot có tọa độ trụ (Cylindrical coordinate robot): Robot có bề dày lịch sử lên đến 50 năm:
Robot này tương tự như robot tọa độ cực, chúng đều có trục quay và cánh tay mở rộng, nhưng sự khác biệt chính là cánh tay di chuyển theo chiều dọc bằng cách trượt chứ không phải bằng cách quay. Các tính năng của nó gần như giống với loại robot tọa độ cực và nó cũng thường được tìm thấy trong các robot công nghiệp thời kỳ đầu. Ngày nay, loại robot này vẫn được sử dụng để vận chuyển các mặt hàng như tấm nền LCD.

Kawasaki’s cylindrical coordinate robot
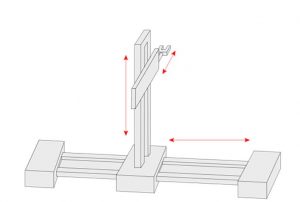
Robot với hệ tọa độ Descartes (Cartesian coordinate robot): Điều khiển một cách đơn giản.
Đây là loại robot có thể di chuyển cả 3 trục nhưng không phải bằng cách xoay mà thay vào đó, nó di trượt trên ba trục vuông góc. Nếu bạn tưởng tượng nó giống như các máy gắp thú trong các trung tâ trò chơi điện tử, bạn có thể dễ dàng tưởng tượng được cách mà robot di chuyển. Khu vực để lắp đặt robot phải đủ rộng vì loại robot này cần một khu vực làm việc tương đối rộng lớn. Tuy nhiên, robot có thể đạt được độ linh hoạt cao và cực kì dễ sử dụng. Vì vập, chúng thường được dùng để di chuyển các vật nặng.
 Kawasaki’s cartesian coordinate robot,
Kawasaki’s cartesian coordinate robot,
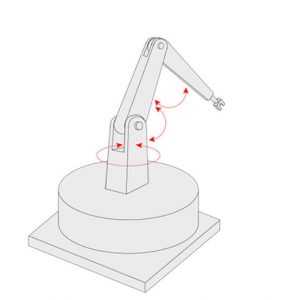
Robot có khớp nối (Articulated robot): Robot có thể đạt độ linh hoạt cao.
Đây là loại robot được sử dụng rộng rãi ở hiện tại. Robot có kết cấu giống như một cánh tay người. Loại robot này có nhiều bậc tự do nhưng việc điều khiển loại robot này cũng rất phức tạp. Robot này thường được sử dụng cho nhiều mục đích khác nhau ví dụ như hàn ô tô.
Robot SCARA (Selective compliance assembly robot arm): robot được mệnh danh là “Người lắp ráp”.
Đây là loại robot có chuyển động ngang vì tất cả các trục quay đều được định vị theo chiều dọc, các công cụ gắn trên robot chỉ có thể chuyển động theo chiều ngang. Những robot này hoạt động bằng cách di chuyển cánh tay ở tốc độ cao đến một điểm trên bề mặt phẳng và sau đó nâng và hạ công cụ. Do đó, chúng rất hữu ích cho các hoạt động trên bề mặt bằng phẳng. Loại robot này được sử dụng rộng rãi trong nhiều công việc, chẳng hạn như xử lý các tấm bán dẫn và lắp ráp bảng mạch.
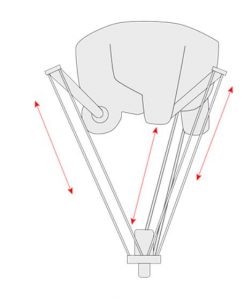
Robot khâu song song (Parallel link robot): Khi tốc độ chính là chìa khóa.
Khác các loại robot khác, thay vị các khâu được nối tiếp, loại robot này có các khớp nối song song với nhau. Nói chung, robot này có ba cánh tay để điều khiển vị trí của công cụ và chúng thường được sử dụng trong các công việc phân loại và lựa chọn các sản phẩm trên các băng chuyền. Mặc dù, tầm hoạt động của robot khá là hạn chế nhưng vì mỗi khớp đều có thể điều khiển trực tiếp công cụ làm việc nên tốc độ chính là điềm mạnh của loại robot này.
Đây chỉ là một vài ví dụ về khả năng của robot công nghiệp, chúng tôi hy vọng rằng bạn đã hiểu cơ bản về các chuyển động chuyên biệt của từng loại robot và các loại những công việc robot có thể thực hiện dựa trên loại robot.
Chìa khóa để chọn một loại robot thích hợp:
Mặc dù tất cả chúng đều được phân loại là robot công nghiệp, nhưng mỗi robot đều có đặc điểm khác biệt với nhau về các khía cạnh như phạm vi làm việc, độ chính xác và tốc độ. Tùy thuộc vào loại khớp và cấu trúc cơ học tổng thể của robot, mỗi loại robot đều có các nhiệm vụ đặc biệt phù hợp với từng loại. Khi áp dụng robot công nghiệp trong công việc sản xuất, việc hiểu và lựa chọn loại robot là một bước cực kì quan trọng.
