Bộ truyền động được sử dụng để di chuyển các công cụ trên máy móc, thông thường là cho mục đích điều khiển các chuyển động hoặc vị trí đặt vật hoặc cảm biến. Chúng có thể là một chuyển động tuyến tính hoặc chuyển động xoay hoặc kết hợp cả hai. Bộ truyền động tuyến tính thường được sử dụng để tạo ra một chuyển động xoay bằng cách đẩy một trục xoay gắn trên trục chính, hoặc một thiết bị xoay như động cơ có thể được dùng để tạo ra chuyển động tịnh tiến thông qua dây đai hoặc vít me. Các ứng dụng cho bộ truyền động sẽ được thảo luận nhiều hơn ở phần 3.7.
Một số từ thuật ngữ được sử dụng trong các cơ cấu chấp hành là home,nâng cao (advanced) hoặc mở rộng (extended), returned (trở lại) hoặc retracted (hủy bỏ), thường được dùng để mô tả vị trí của một bộ truyền động hoặc các công cụ của nó. Cần phải thật cẩn thận để xác định người thiết kế đang đề cập đến công cụ hoặc cơ cấu chấp hành nào. Những vị trí có thể đối nghịch lại với nhau và gây ra việc thiết lập lại về cơ khí và thay đổi chương trình phần mềm nếu hiểu sai. Chúng chỉ phù hợp khi đề cập đến những vị trí của công cụ nói chúng bởi vì chúng có thể được xác định một cách dễ dàng với việc bảo trì hoặc người vận hành.
Phần mô tả như “Công cụ nâng” hoặc “Tấm nâng hàng không mở rộng” có thể giúp cho giảm thiểu được sự mơ hồ về các chuyển động chung cho các kỹ sư thiết kế điện cũng như cơ khí.
1 Bộ truyền động khí nén và thủy lực và van
Để sử dụng năng lượng khí nén và thủy lực thì người ta thường dùng năng lượng của chất lỏng. Cách hoạt động của các bộ truyền động ứng dụng năng lượng chất lỏng là tương tự với lưu lượng chất lỏng hoặc khí trong các hệ thống, tuy nhiên hệ thống khí sử dụng khí nén dễ dàng còn đối với năng lượng thủy lực thì được tạo ra thông qua một lưu lượng chất lỏng được nén ít hơn, thường là dầu.
Bộ truyền động khí nén và thủy lực có thể là ở dạng tịnh tiến hoặc xoay. Xylanh khí nén tạo ra một chuyển động tịnh tiến bằng cách dẫn khí qua cổng cấp khí ở một bên hoặc bên mặt còn lại của piston bên trong ống. Bởi vì khí được cấp vào van trong phần cuối của xylanh, tương tự với van xả khí ở bên còn lại. Sơ đồ thông số kỹ thuật bên trong của một xylanh khí được thể hiện trong hình 1. Phần cuối của cần piston được bắt ốc để có thể gắn với nhiều công cụ khác, như máy khoan hoặc núm tay gạt.
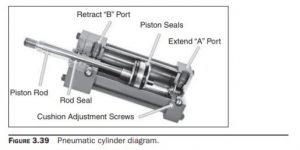
Chuyển động đơn của các xylanh sử dụng lực được cấp bởi khí nhằm di chuyển theo một hướng và một lò xo để kéo xylanh lại vị trí ban đầu hoặc để vị trí rút về. Chuyển động đôi của xylanh sử dụng khí để làm di chuyển theo cả hai hướng duỗi thẳng và rút về. Chúng có hai đầu để cho khí vào: một để duỗi xylanh và cái còn lại để rút xylanh về. Đối với một xylanh thông dụng, piston bề mặt tròn được gắn với một cần duỗi với vị trí cuối của thân xylanh. Một số xylanh có một cái cần được gắn với cả hai mặt của piston và có thể duỗi ra theo hai điểm đầu cuối của thân xylanh. Chúng được gọi là xylanh hai hướng hành trình hoặc xylanh hành trình tịnh tiến đảo chiều.
Xylanh khí nén được xác định bởi lỗ khoan, hoặc đường kính piston và hành trình của chúng, hoặc khoảng cách xa nhất mà trục có thể di chuyển tới. Một số thông số kỹ thuật nữa như cơ cấu giảm chấn của phần cuối chuyển động, kích thước cổng dẫn khí, và phương pháp gắn cũng thường bao gồm trong một số phần. Kích thước thường được xác định theo hệ mét và tiêu chuẩn đo lường. Vì hành trình được xác định theo độ dài, nên khoảng hành trình thường được giới hạn bằng cách dùng mặt bích hoặc giới hạn sử di chuyện bằng các công cụ dừng. Khi việc này được hoàn thành, cơ cấu giảm chấn sẽ không còn hữu ích như như khi nó ở được đặt ở điểm xa nhất của hành trình xylanh.
Hình 2 một xylanh dẫn hướng có hành trình rất dài. Chúng có bạc đạn ở khối dẫn, là khối chịu tải xuống của cần piston và đảm bảo rằng lực được đặt lên nó là thẳng vuôn góc. Khối dẫn có thể được đặt làm như một phần riêng biệt để gắn vào trong một xylanh.

Xylanh khí nén không có cần sẽ không có cần piston. Chúng là cơ cầu chấp hành sử dụng khớp nối cơ khí hoặc khớp nối nam châm để chịu lực tác động, thông thường là từ một bàn máy hoặc phần thân nào đó có thể di chuyển dọc theo chiều dài của thần xylanh nhưng không được duỗi dài hơn phần thân đó. Chúng còn thường được gọi là xylanh kiểu dây đai. Được thể hiện trong hình 3

Xylanh khí nén hiện có rất nhiều kích thước và các loại từ nhỏ với xylanh khí nén đường kính 2.5mm, là loại xylanh có thể sử dụng để gắp các linh kiện điện tử nhỏ, cho đến xylanh khí nén đường kính 400mm, là loại xylanh phù hợp chịu lực để nâng xe hơi. Một số xylanh khí nén khác có thể đạt tới đường kính 1000mm và được sử dụng để thay thể xylanh thủy lực trong một số trường hợp đặc biệt ở những tình huống rò rỉ dầu có thể gây ra sự nguy hiểm.
Van khí nén hoạt động bằng cách sử dụng một cuộn dây solenoid, là thứ có thể thay đổi đầu dẫn hướng bên trong van. Đầu dẫn hướng này cho phép khí đi qua từ cổng vào đến cổng ra, nó cũng cho phép khí thoát ra ngoài ở bên xả khí của xylanh thông qua van. Nhiều van được có thể được sắp xếp theo nhiều cách khác nhau, tùy thuộc vào yêu cầu ứng dụng. Van khí nén được mô tả chung bằng số lượng cổng trên thân van và số vị trí đầu dẫn hướng mà van có. Giống như một mạch điện, chúng thường được xác định bằng số NO và NC, liên quan đến trạng thái ngắt nguồn của chúng. Một số ví dụ của chúng là van 2/2, van 3/2. Hầu hết các hệ thống tự động sẽ sử dụng các loài van 5/2 hoặc 5/3 với phần mở hoặc đóng ở giữa, tùy thuộc vào việc muốn di chuyển tay các cơ cấu chấp hành khí van ở tình trạng ngắt điện hoặc không ngắt.
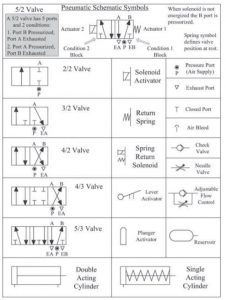
Thêm vào các vấn đề về van, việc điều chỉnh và các thiết bị như điều khiển lưu lượng, mức áp suất quy định, bộ phận lọc và một hệ thống nhiều ống và vòi phun là rất cần thiết để hoàn thành một hệ thống khí nén hoặc thủy lực. Bộ tích trữ và tăng áp suất cũng được biết đến là những thành phần thường được sử dụng trong mạch khí nén. Bảng 1 thể hiện một số ký hiệu khí nén cho một số loại van và thiết bị khác.
Xylanh thủy lực và các bộ truyền động hoạt động tương tự với cách mà khí nén hoạt động, ngoài trừ là chúng cần phaỉ chịu được áp suất và lực lớn hơn. Cần phải thật thận trọng để ngăng không cho chất lỏng thoát ra ngoài từ các cơ cấu truyền động. Vì lý do này, mà các cơ cấu chấp hành thủy lực sẽ được xây dựng chắc chắn hơn các xylanh khí nén thông thường. Cần gạt ngoài thường được bắt ốc ở phần cuối của nắp để có thể giúp chịu được một lực lớn tác dụng bên trong xylanh. Xylanh thủy lực được sử dụng để ứng dụng các yêu cầu về lực lớn, hay lực nén.
Không giống như các hệ thống khí nén, thường được hệ thống cấp toàn nhà máy, hệ thống thủy lực có riêng những chiếc máy bơm. Khi dầu được nén, chúng sẽ sinh ra nhiệt, do đó chất lỏng cũng cần phải được làm mát. Bởi vì yếu tố phát sinh này, mà hệ thống thủy lực sẽ mắc tiền hơn hệ thống khí nén. Hỗn hợp các thiết bị như bộ truyền động không khí trên dầu đôi khi cũng giảm bớt giá thành và sự phức tạp của hệ thống thủy lực.
2 Các bộ truyền động điện
Các bộ truyền động chay bằng điện cũng thường được sử dụng khi khí nén không thể sử dụng hoặc độ chính xác về vị trí là bắt buộc. Mặc dù thông thường thì chúng có giá thành cao hơn một xylanh khí nén, nhưng chúng lại không mắc và phức tạp bằng một hệ thống thủy lực. Các bộ truyền động điện thường là chạy bằng động cơ servo và vít me hoặc dây đai. Chúng có thể được tìm thấy trong nhiều gói thông số kỹ thuật tương tự như xylanh khí nén.
Một cuộn solenoid điện từ nhỏ có thể được sử dụng để duỗi một cần gạt ở một khoảng cách ngắn; chúng bao gồm một cuộn dây dẫn được quấn dây xung quanh một chổi quét với một cái cần kim loại bên trong. Một ví dụ điển hình cho kiểu cơ cấu chấp hành này là những cái sử dụng trong máy bắn bi. Đầu dẫn hướng trong van solenoid cũng sử dụng chung nguyên lý như vậy.
3 Điều khiển các chuyển động
Điều khiển chuyển động thường được xem là một phần con của lĩnh vực tự động hóa. Điều khiển chuyển động khác với điều khiển rời rạc như xylanh khí nén, băng tải, và những thứ giống vậy, vì các vị trí và vận tốc phải được điều khiển đồng thời nhờ sự chuyển đổi tín hiệu analog hoặc tín hiệu số sang dạng analog. Đây là việc cần được hoàn thành bằng cách sử dụng cân đối giữa các van khí nén hoặc thủy lực, các cơ cấu chấp hành tịnh tiến, hoặc các động cơ điện, thường là servo. Động cơ bước cũng là một công cụ thường thấy trong các quá trình điều khiển các chuyển động nhỏ. Điều khiển chuyển động được sử dụng một cách rộng rãi trong các quá trính đóng gói, in, linh kiện bán dẫn, và công nghiệp lắp ghép. Nó cũng hình thành nên các dạng robotic và máy móc CNC.
Các kiến trúc cơ bản của một hệ thống điều khiển chuyển động bao gồm:
- Điều khiển chuyển động để tạo ra ngõ ra mong muốn hoặc một biểu đồ hoạt động. Chuyển động là dựa phần lập trình điểm cài đặt và điểm kết thúc vị trí hoặc vong lặp phản hồi vận tốc
- Một sự truyền động hoặc khuếch đại là để thay đổi tín hiệu điều khiển từ bộ điều khiển chuyển động khi điều khiển dòng điện hoặc điện áp ở công suất lớn. Đây là thứ được áp dụng cho các cơ cấu chấp hành và làm chúng chuyển động
- Một cơ cấu chấp hành như xylanh khí nén hoặc thủy lực, bộ truyền động tịnh tiến, hoặc động cơ điện cho chuyển động ở ngõ ra.
- Một hoặc nhiều tín hiệu phản hồi của cảm biến, như encoder quang, bộ resolver, hoặc các thiết bị theo hiệu ứng Hall. Chúng sẽ trở lại vị trí hoặc vận tốc của bộ truyền động đến bộ điều khiển chuyển động có thể đóng vị trí hoặc vòng lặp điều khiển vận tốc. Một sự truyền động mới “thông minh” hơn có thể đóng vị trí và vòng lặp vận tốc từ bên trong, kết quả cho việc điều khiển chính xác.
- Các thiết bị cơ khí thay đổi chuyển động của cơ cấu chấp hành thành chuyển động mong muốn. Ví dụ là các trục, khớp nối, vít me, đai, bánh răng và các bạc đạn tịnh tiến hoặc xoay.
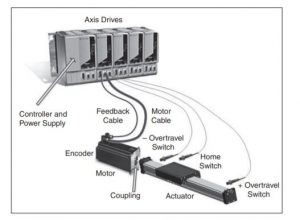
Hình 4 thể hiện sư sắp xếp vật lý của một hệ thống điều khiển chuyển động
Để điều khiển trục một chuyển động độc lập thì rất phổ biến; tuy nhiên, có những lúc các chuyển động phải được phối hợp một cách chặt chẽ với nhau. Điều này yêu cầu sự đồng bộ chắc chắn giữa các trục. Robotics là một ví dụ các hệ thống chuyển động kết hợp với nhau. Trước tiên là sự phát triển của các giao diện kết nối mở ở đầu năm 1990, phương pháp mở duy nhất của việc kết hợp các chuyển động là điều khiển analog gửi lại cho bộ điều khiển theo dạng mã hóa, xử lý, và các phương pháp analog khác như chuyển đổi tín hiệu từ 4 đến 20mA và 0 đến 10V. Đường dẫn mở tự động hóa đầu tiên có thể đáp ứng yêu cầu kết hợp điều khiển các chuyển động này là Sercos. Đây là một chuẩn quốc tế có thể đóng tín hiệu vòng lặp phản hồi của servo trong một chuyển động tốt hơn là bộ điều khiển chuyển động. Sự sắp xếp này có thể giảm bớt việc tính toán trên bộ điều khiển, cho phép điều khiển nhiều trục cùng một lúc. Vì sự phát triển của Sercos, các giao diện khác đã được phát triển với mục đích này, bao gồm ProfiNet, IRT, CANopen, Ethernet Power Link, và EtherCAT.
Bên cạnh các chức năng điều khiển thông dụng về vận tốc, vị trí, thì cũng còn một số các ứng dụng khác cần được xem xét. Vì momen xoắn phản hồi cần phải được quyết định bởi dòng điện và vận tốc của servo, áp suất hoặc điều khiển lực là một chức năng khác của các bộ truyền động servo. Các bánh răng điện tử có thể được sử dụng để kết nối hai hoặc nhiều trục với nhau theo quan hệ chủ/tớ (master/slave). Biểu đồ Cam, nơi một trục đi theo chuyển động của một trục chính là một ví dụ cho vấn đề này. Nhiều biểu đồ chi tiết, như chuyển động hình thang hoặc dạng chứ S, có thể được tính toán bằng một bộ điều khiển chuyển động nâng cao theo tiêu chuẩn vị trí. Điều này giúp ta loại bỏ ảnh hướng của các gia tốc hoặc hãm tốc.
Một trong các nguồn online về các lý thuyết điều khiển vị trí tốt nhất và các yếu tố khác là Motion Control Resource. Đây là một trang web tuyệt vời và miễn phí về các quảng cáo, trang kết nối với các nhà sản xuất và phân phối thiết bị điều khiển chuyển động
