Bộ khung cơ khí được gia công chính xác nhất, đảm bảo các tiêu chí trong ứng dụng công nghiệp, trong các công đoạn thực nghiệm, ứng dụng trong đào tạo và học thuật
Bộ khung cơ khí delta cũng được tùy biến để phù hợp với nhiều bộ điều khiển tự động khác nhau, phù hợp với các loại động cơ thông dụng như động cơ bước, động cơ hybrid, động cơ servo, ..
Bộ khung robot delta được thiết kế chế tạo tại Việt Nam nên chúng tôi có thể tùy chỉnh các thông số theo đúng mong muốn của khách hàng.
Có thể mua theo dạng khung rời, hoặc tích hợp thêm băng tải, tích hợp khung bao,..
Phương pháp làm việc của Robot Delta và thông số kỹ thuật của nó
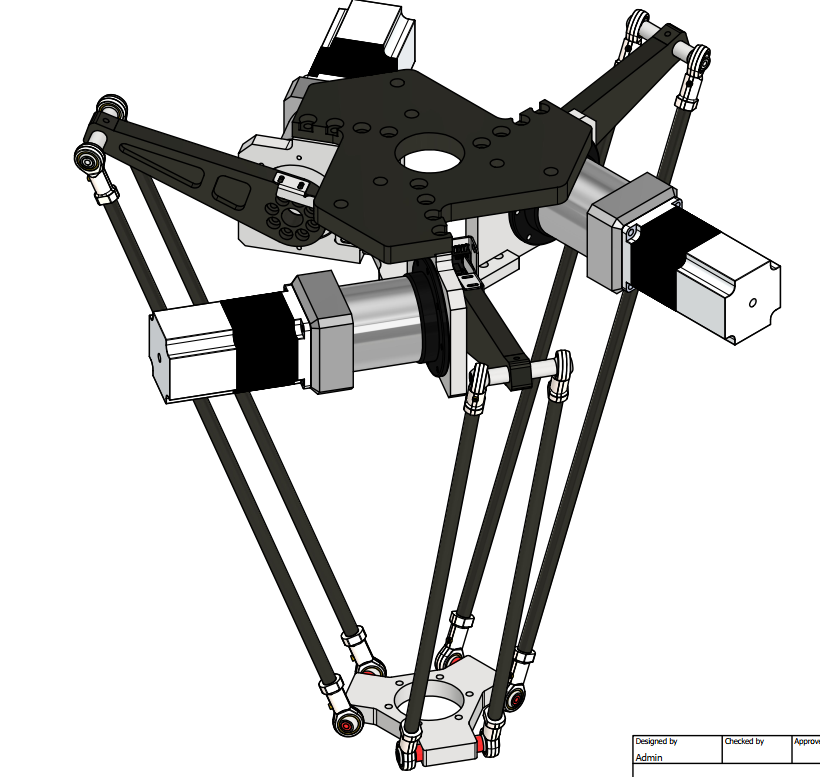
Hầu hết các rô-bốt delta bao gồm 3 động cơ servo có mô-men xoắn cao được gắn vào một khung cứng sau đó có một cánh tay được gắn trên mỗi trục động cơ; các cánh tay phải vuông góc với trục quay của trục. Để ngăn chặn bị vặn xoắn, các cánh tay được gắn chặt vào các thanh kết nối được bố trí theo hình bình hành. Các cánh tay này được kết nối với một bệ trung tâm. Mỗi thanh song song có các khớp ở cả hai đầu thường là khớp dạng bi cầu (mắt trâu) và cho phép chuyển động không bị hạn chế. Bộ phận công tác đảm nhận việc thực thi có thể gắn các kiểu cơ cấu chấp hành theo mong muốn như gắp thả, hút chân không, đầu khoan, mài, hàn,…
Vì động cơ servo được lắp trên khung nên chuyển động được truyền đến cánh tay và do thiết kế này nên động cơ cần có mô-men xoắn cao để chống lại lực đòn bẩy tăng lên do tải trọng tác dụng lên trục.
Khi sử dụng và lập trình robot, bạn cần tìm hiểu thêm về các vấn đề kỹ thuật. Hoặc các thiết lập sẵn trên mạch sẵn có.
Bây giờ, chúng ta sẽ nói về động học. Một chủ đề cơ bản và đã được xác lập trong ngành robot, động học là nghiên cứu về mối liên hệ giữa tọa độ khớp của robot và tổ chức không gian của nó.
Đối với động học của robot delta, có động học ngược và động học thuận.
Động học ngược liên quan đến việc tìm các góc thích hợp (theta1, theta2, theta3) cho mỗi một trong ba cánh tay tương ứng với vị trí mong muốn của bộ phận cuối (X, Y, Z).
Động học chuyển động về phía trước liên quan đến việc xác định vị trí của bộ phận cuối (X, Y, Z) nếu biết góc của các cánh tay (theta1, theta2, theta3).
Có nhiều loại robot delta khác nhau tùy theo mức độ tự do của chúng:
Có loại Robot Delta 3 bậc tự do, trong đó bộ phận tác động cuối có thể di chuyển tự do quanh trục X và Y và có giới hạn di chuyển trên trục Z với các cánh tay được kết nối trực tiếp với động cơ.
Robot Delta 4 DOF ban đầu được phát minh bởi Clavel. Trục tự do thứ 4 là chuyển động theta quanh trục Z.
Robot Delta 6 trục, ngoài Robot Delta 3 bậc tự do, còn có thêm 3 bậc tự do nhờ động học nối tiếp với 3 bậc quay gắn vào bộ phận chấp hành cuối.
Khung base: Thép
Khung lắp ráp delta: Nhôm
Tay đòn: Ti tròn mạ crom
Payload: 3kg
Hộp số : Đài Loan, mặt bích . Hoặc tùy chọn hộp số Harmnic S17
Bích động cơ servo 200-600W/ Stepper 57-86
Trọng lượng full: 15kg
Bộ khung không bao gồm động cơ.
Robot delta với cấu hình tùy theo mong muốn và ứng dụng của khách hàng, Có thể sử dụng cho nhiều loại động cơ, mạch điều khiển khác nhau. Tùy kinh phí có thể tùy biến phù hợp, với giá thành tốt nhất
Robot Delta Maxarm có gì đáng chú ý
Trọn bộ khung được gia công CNC chính xác cao
Vật tư quan trọng sử dụng linh kiện G7
Sản phẩm được sản xuất tại Việt Nam nên luôn chủ động về nguồn hàng, xử lý các vấn đề phát sinh khi sử dụng
Được thiết kế chế tạo phù hợp với thị trường, giảm chi phí sử dụng, dễ dàng tương thích với các trang thiết bị hiện có
Đặc biệt hơn, có cung cấp linh kiện từng phần, cung cấp bộ khung cơ khí Delta, trọn bộ robot delta, bộ điều khiển, ..
HÌnh ảnh thực tế của sản phẩm:

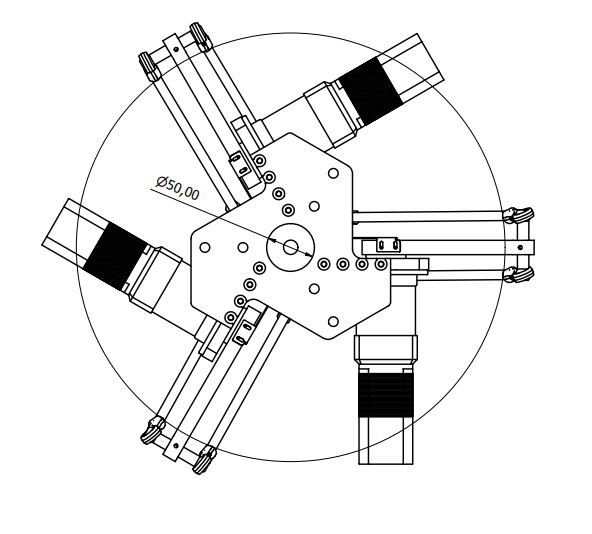
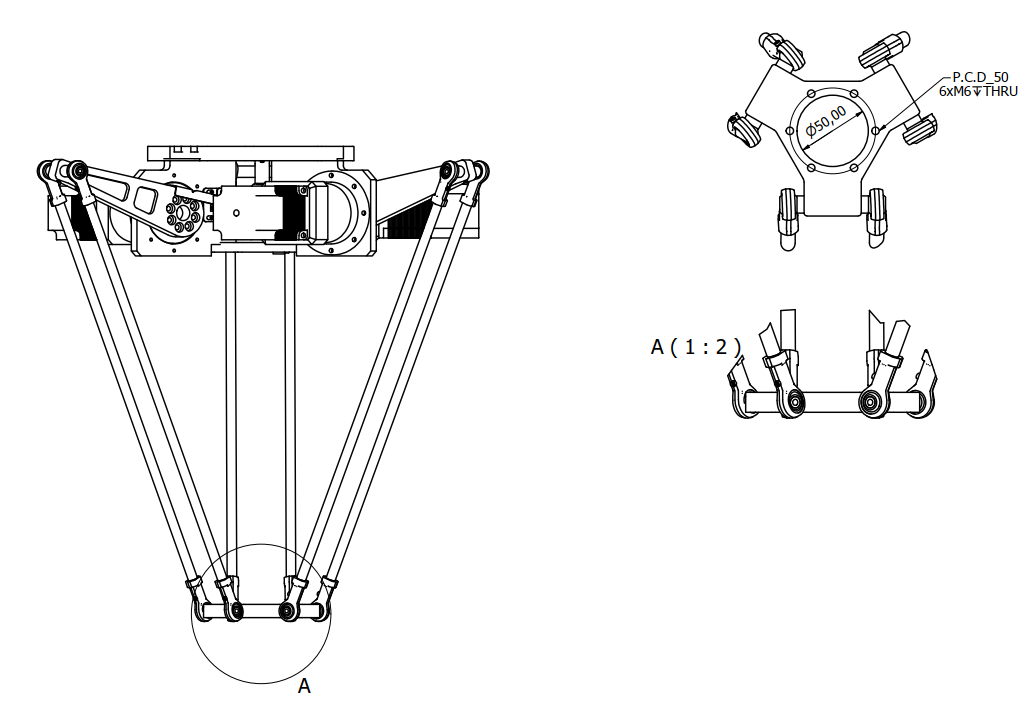
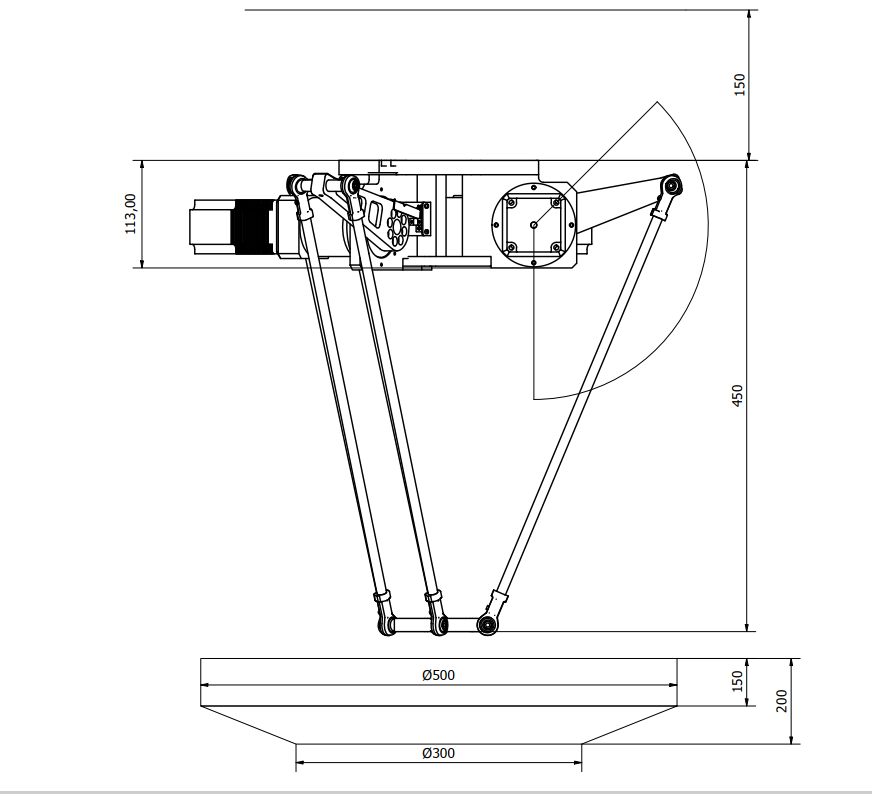
Thông tin chi tiết của sản phẩm:
