Việc hiểu cấu tạo của một xe lăn điện không chỉ giúp tự khắc phục các sự cố hoặc tìm hiểu sâu hơn phần kỹ thuật của xe mà còn giúp khách hàng tự tin hơn khi mua xe, vì biết phần nào là quan trọng, phần nào không. Chỉ cần có phương án khắc phục thay thế là có thể sử dụng lâu dài, sau này hết bảo hành thì nhờ dịch vụ hoặc gởi các trung tâm bảo hành hỗ trợ với chi phí thấp nhất.
Cách xe lăn điện di chuyển và đổi hướng
Xe lăn điện hoạt động tương tự như xe tăng, nghĩa là không có cơ cấu đổi hướng mà bạn thường thấy trên xe đạp hoặc xe máy, thậm chí không phải có cả vô lăng. Và thắc mắc của rất nhiều người khi tìm hiểu kỹ về xe lăn điện là cách mà nó đổi hướng, bởi sợ mua về không biết có thay đổi hướng được không, hay phải cần thêm cơ cấu nào khác?
Xe lăn điện gồm 1 động cơ cho bánh bên trái và một động cơ bên phải. Khi hai bánh cùng quay về trước khi xe sẽ di chuyển về phía trước và ngược lại
Khi xe đổi hướng thì 2 bánh xe quay ngược chiều hoặc một động cơ hoạt động.
Cách xe lăn điện tăng giảm tốc
Việc tăng giảm tốc trên xe điện được tích hợp trên cần điều khiển, khi cần điều khiển ở vị trí chính giữa nó sẽ đứng yên ( tốc độ bằng 0). Khi đẩy cần điều khiển theo các hướng thì xe sẽ quay theo hướng đó, loại điều khiển chất lượng cao sẽ có tới 8 hướng, nghĩa là có thể di chuyển theo các góc 45 độ chứ không phải chỉ có tiến lùi, trái phải. Đẩy càng xa thì tốc độ càng lớn.
Việc tăng giảm tốc độ này sẽ do bộ biến trở tích hợp trên tay joystick thực hiện.
Cách xe lăn điện thay đổi mức tốc độ tiêu chuẩn
Để phù hợp với các địa hình cũng như điều kiện sử dụng khác nhau, xe lăn điện thường có tới 3-4 cấp tốc độ để người sử dụng cài đặt. Ví dụ như di chuyển trong nhà cần tốc độ chậm thì sử dụng mức 1, hoặc di chuyển qua các vị trí khó khăn, di chuyển chậm để ngắm cảnh,..
Và nếu đi ra đường, hoặc đi các khoảng cách tương tối thì sử dụng mức tốc độ tối đa.
VIệc thay đổi cấp tốc độ giúp an toàn cho người sử dụng, tránh tốc độ cao khó kiểm soát
Cách hiển thị dung lượng pin trên xe lăn điện
Việc hiển thị pin trên xe lăn giúp người sử dụng biết khi nào cần sạc, biết thời gian sử dụng còn lại để xử lý các tính huống, như ra quán café, ra nhà người thân rồi sạc, hoặc chờ sạc tương đối rồi mới đi ra ngoài
Hiển thị pin trên xe lăn được thực hiện thông qua nguyên lý đơn giản đó là Vôn Kế, khi ắc quy đầy nó sẽ báo 12.6V, và thấp sẽ đưới 12V, và mức độ bao nhiêu sẽ do nhà sản xuất tự tính toán để chia ra số phần trăm mà ắc quy có
Hệ thống truyền động
Có bốn kiểu chung của hệ thống dẫn động: trước, trung tâm, bánh sau và tất cả các bánh. Bánh xe dẫn động bằng điện thường lớn hơn một chút so với bánh xe lái. Bánh xe trung tâm điều khiển xe lăn điện, thường bố trí bánh xe lái đặt ở cả phía trước và phía sau để bố trí kiểu sáu bánh xe. Một số xe lăn tay cũng có thể được trang bị hệ thống điện phụ trợ. Điều này có thể có một trong ba hình thức: 1) tích hợp với bánh xe sau dùng lực tay để điều chỉnh lực đẩy, 2) gắn dưới ghế xe lăn và được điều khiển như xe lăn điện nhưng dẫn động thông qua ma sát hoặc 3) được truyền trực tiếp qua một bánh xe phụ trợ.
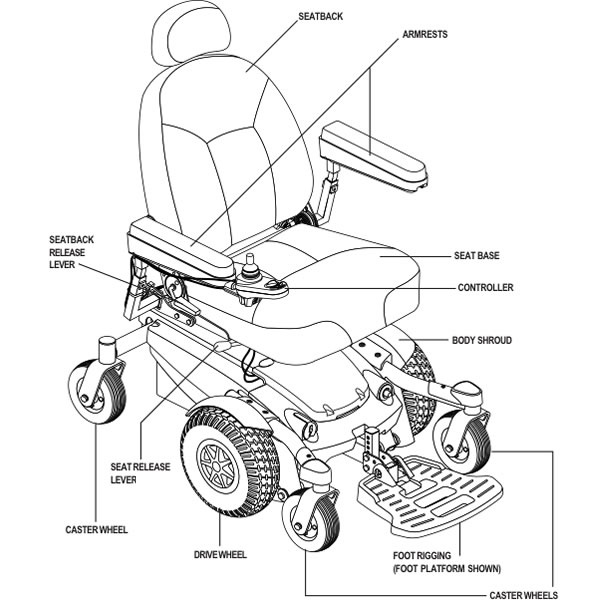
Bộ điều khiển
Bộ điều khiển thường là một cần điều khiển gắn trên chỗ nghỉ tay có thể có thêm các chức năng điều khiển bổ sung để cho phép người dùng điều chỉnh độ nhạy hoặc truy cập nhiều chế độ khác nhay. Bộ điều khiển có thể được xoay đi để hỗ trợ chuyển bên. Đối với người dùng không thể sử dụng bộ điều khiển tay, có nhiều lựa chọn thay thế khác như bộ điều khiển sip-and-puff (điều khiển bằng thổi hơi), hoạt động bằng cách thổi vào cảm biến. Trong một số trường hợp, bộ điều khiển có thể được gắn để sử dụng bởi người đi phía sau ghế chứ không phải bởi người ngồi. Chức năng bao gồm quay một bánh xe về phía trước trong khi bánh kia đi lùi, do đó có thể quay xe lăn trong phạm vi chỉ nhỏ bằng chiều dài xe.
Những tiến bộ quan trọng nhất đến từ việc sử dụng nhiều hơn các bộ vi xử lý và công nghệ máy tính. Nghiên cứu công nghệ sử dụng giọng nói, mắt, cử chỉ đầu, và thậm chí cử chỉ lưỡi, vv để kiểm soát xe lăn xuất hiện nhanh chóng. Hệ thống điều khiển như vậy có thể thuận tiện hơn và tiết kiệm công sức cho người dùng, đặc biệt là đối với những người bị khuyết tật nghiêm trọng. Ví dụ, các mô đun ước tính cử chỉ lưỡi có thể được ghi lại với sự trợ giúp của máy ảnh. [7] Để làm cho hệ thống an toàn hơn và có thể sử dụng, việc tránh chướng ngại vật và mô-đun phản hồi rung động thời gian thực được thêm vào hệ thống để thông báo cho người dùng bằng cách gắn 12 động cơ siêu nhỏ có thể xoay ở một tần số nhất định được bố trí trong một dải 2D ở mặt sau của xe lăn và khi xảy ra lỗi do nhận dạng không chính xác bởi các mô-đun ước tính cử chỉ lưỡi, người dùng sẽ nhận thấy bởi các kích thích rung bất thường từ phía sau.
Gần đây nhất, “điều khiển bằng suy nghĩ “trên xe lăn điện đã được báo cáo và đã được chứng minh trong môi trường phòng thí nghiệm, như trong Hình 1.4 [8]. Chiếc ghế robot có thể cách mạng hóa cuộc sống cho những người khuyết tật nghiêm trọng không thể sử dụng cần điều khiển thông thường. Nó hoạt động bằng cách phát hiện sóng não hoặc tín hiệu thần kinh thông qua các cảm biến trên da đầu hoặc các nơi trên cơ thể, tạo ra một bức tranh ba chiều của khu vực xung quanh nó. Để điều khiển chiếc ghế, người dùng chỉ cần tập trung suy nghĩ của họ vào phần màn hình nơi họ muốn đến. Các điện cực trong hộp sọ sau đó phát hiện hoạt động não của người dùng – và tìm ra điểm đến của họ.
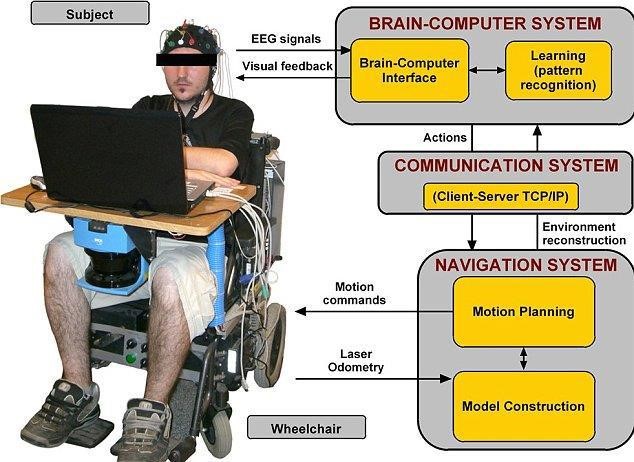
Hình 1.4 Một chiếc xe lăn điện tiên tiến có hệ thống điều hướng và định vị tích hợp sẵn và khả năng điều khiển bằng tín hiệu sóng não [8]
Triển khai hệ thống nhận dạng dựa trên laser (LRF) vào xe lăn điện là một cách mới để cải thiện hoạt động và an toàn của xe lăn. Tuy nhiên, hầu hết các hệ thống nhận dạng đường đi không thể quan sát chi tiết điều kiện đường xá và có thể bị ảnh hưởng do quét lỗi quan sát và phân biệt đường trải nhựa hoặc mặt đường, mặt nước và lá rụng, v.v. Trang bị thêm mô-đun cảm biến tầm nhìn có thể cho phép ứng dụng nhận thêm thông tin về màu sắc trong nhận dạng đường, nhưng màu sắc khác nhau trong các điều kiện ánh sáng khác nhau vẫn còn khó khăn để giải quyết. Hơn nữa, nhận dạng đường dựa trên sự kết hợp giữa LRF và cảm biến tầm nhìn đòi hỏi một lượng lớn thời gian tính toán. Hình 1.5 cho thấy LRF nhiều lớp (MLRF) được tích hợp trên xe lăn [9].
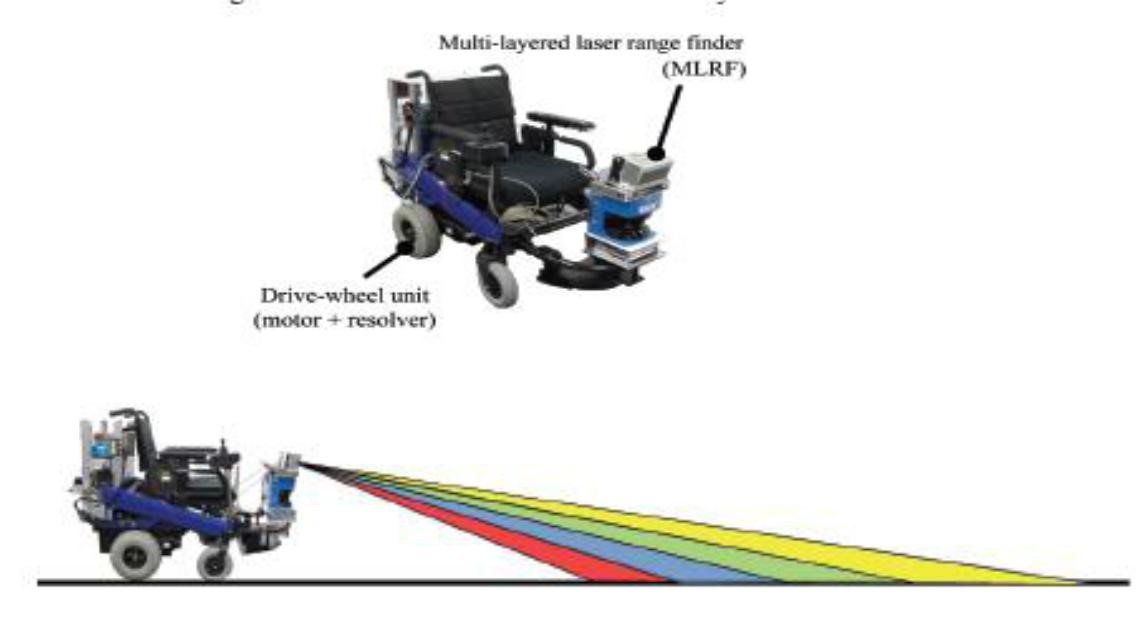
Hình 1.5 Các mặt phẳng quét của MLRF; Bốn màu khác nhau biểu thị các lớp laser[9]
