Hướng dẫn chi tiết CÁNH TAY ROBOT IN 3D KHỔNG LỒ



Giới thiệu: cánh tay Robot in 3D khổng lồ
Bạn có thể tham khảo sản phẩm hoàn thiện và bộ kit tại đây.
Bạn đã bao giờ muốn tạo ra một cánh tay robot khổng lồ, 6 trục, các chi tiết được làm chủ yếu là 3D chưa? Và chúng tôi sẽ hướng dẫn bạn làm thế nào thực hiện điều đó. Sử dụng một file gồm các chi tiết in 3D, động cơ bước, một board điều khiển máy in 3D, một nguồn điện, và các phần cứng có sẵn, chúng tôi sẽ tạo ra một cánh tay robot lớn với nhiều tính năng.
Các bậc Robot tự do
Vai
Khuỷu tay
Cổ tay xoay
Cổ tay
Kẹp
Trục Xoay chính
Bước 1: Chi tiết in 3D

Tất cả các tệp STL bạn cần in có sẵn trong kho lưu trữ GitHub cho dự án này.
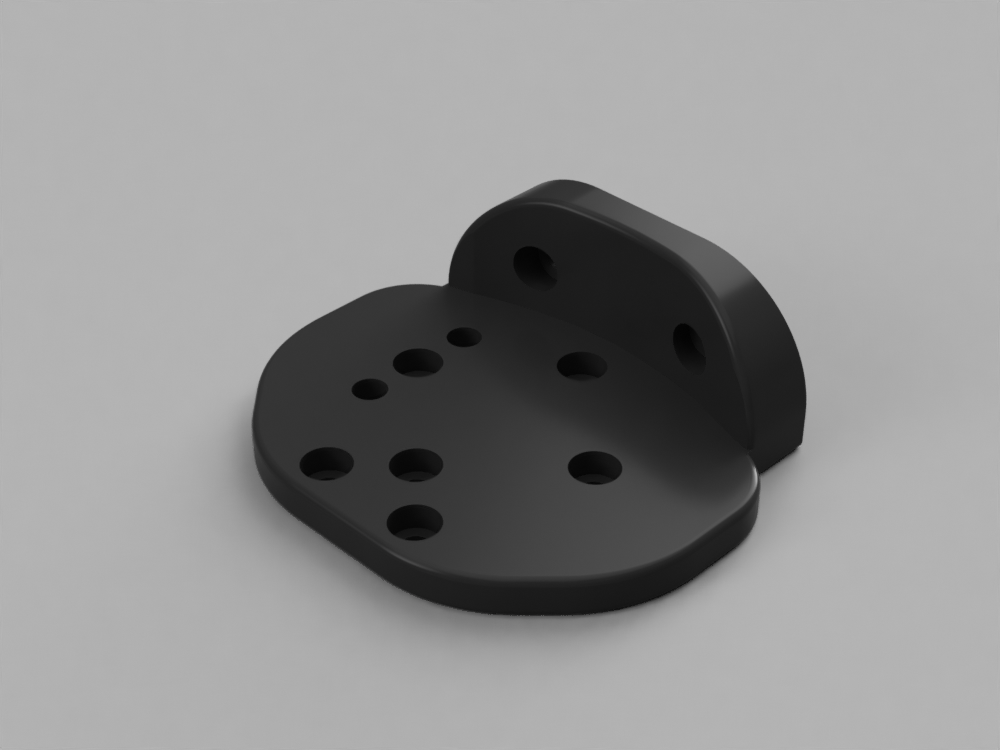 Gripper Top Plate Số lượng: 1 |
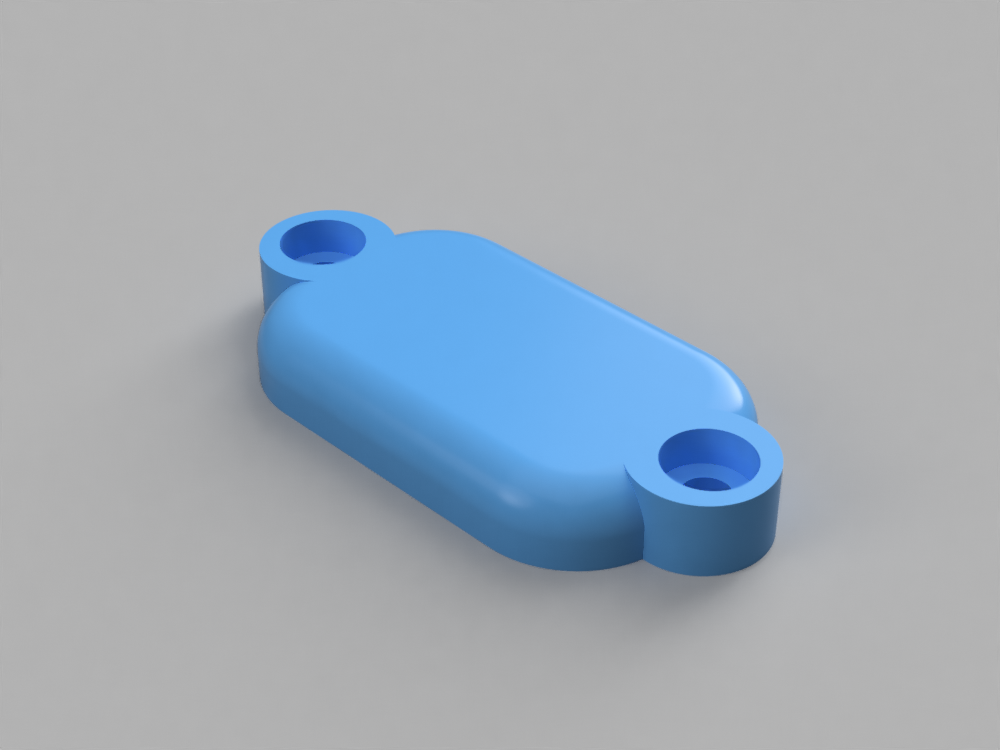
 Elbow Shaft Cover Số lượng: 2 |
 Cổ tay Cover Quay Số lượng: 1 |
 Trục Cổ tay số lượng: 2 |
 Trục Vai số lượng: 2 |
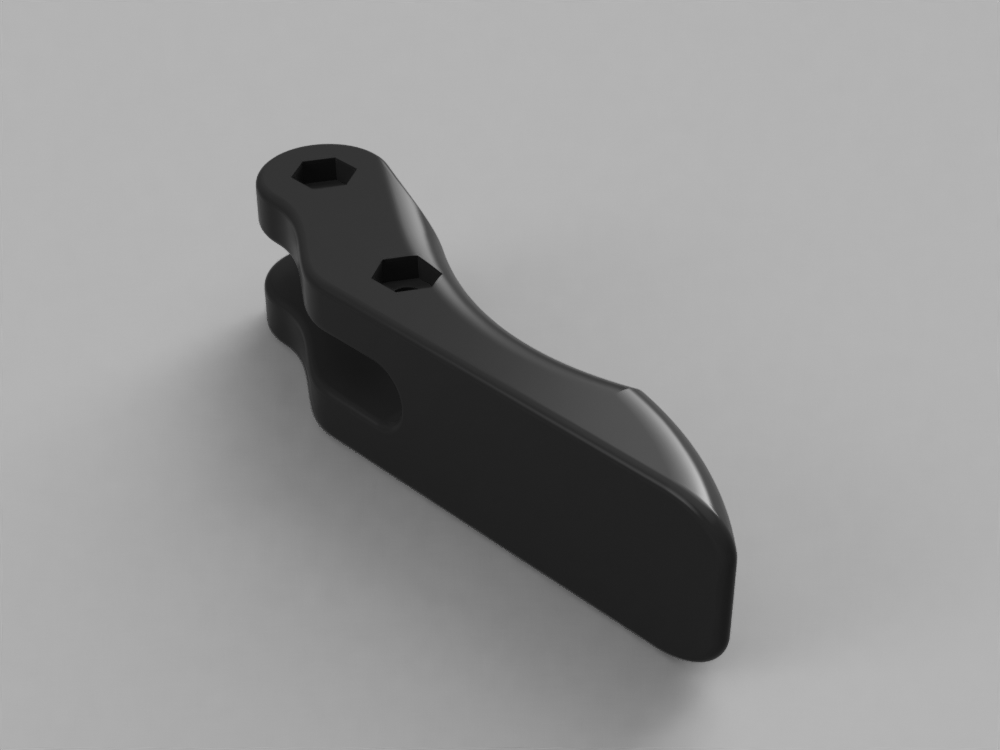
 Thiết bị Servo B Số lượng: 1 |
 Elbow Belt Tensioner Số lượng: 1 |
 Wrist Belt Tensioner Số lượng: 1 |
 Vai vành đai Tensioner Số lượng còn lại : 1 |
 Vai vành đai Tensioner Số lượng phải : 1 |
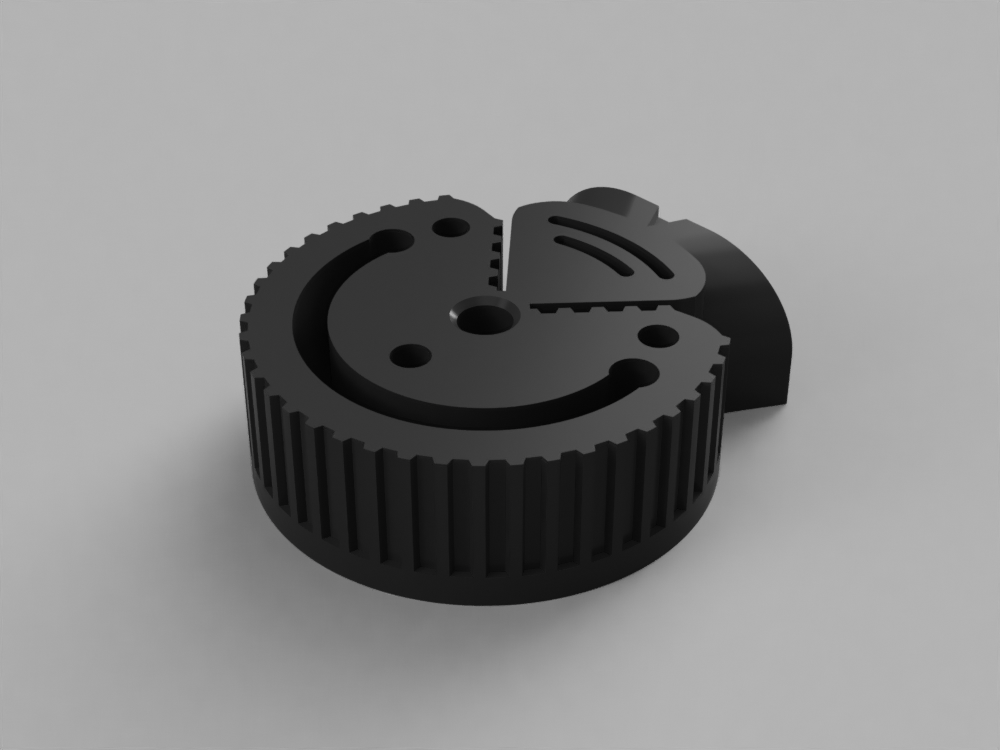
 Servo Gear A Số lượng: 1 |
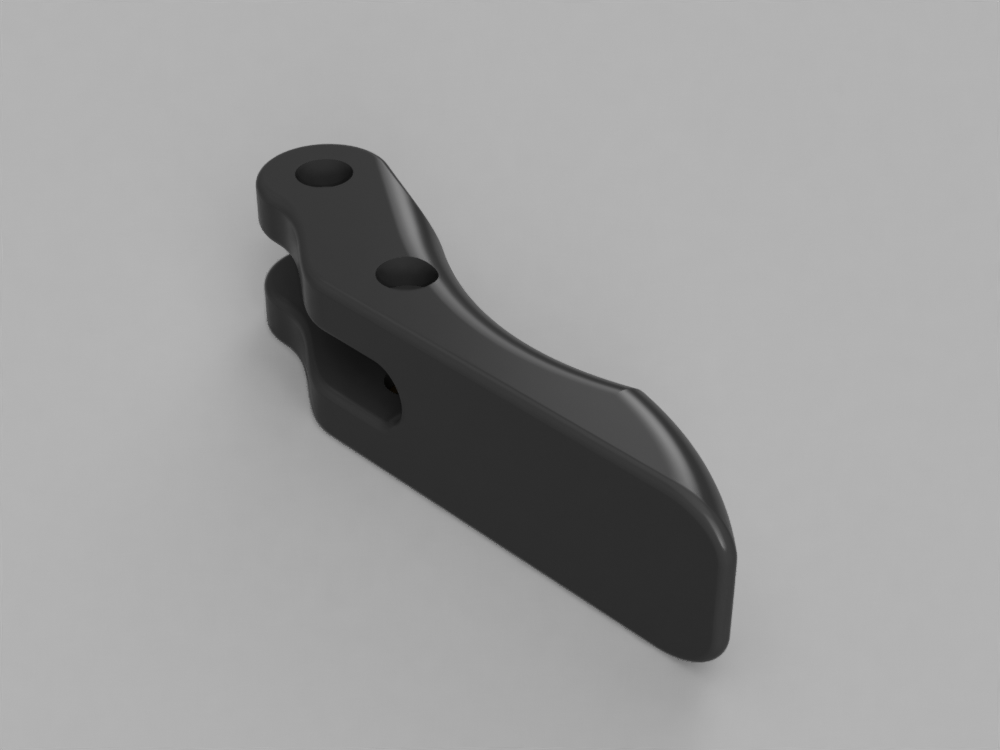
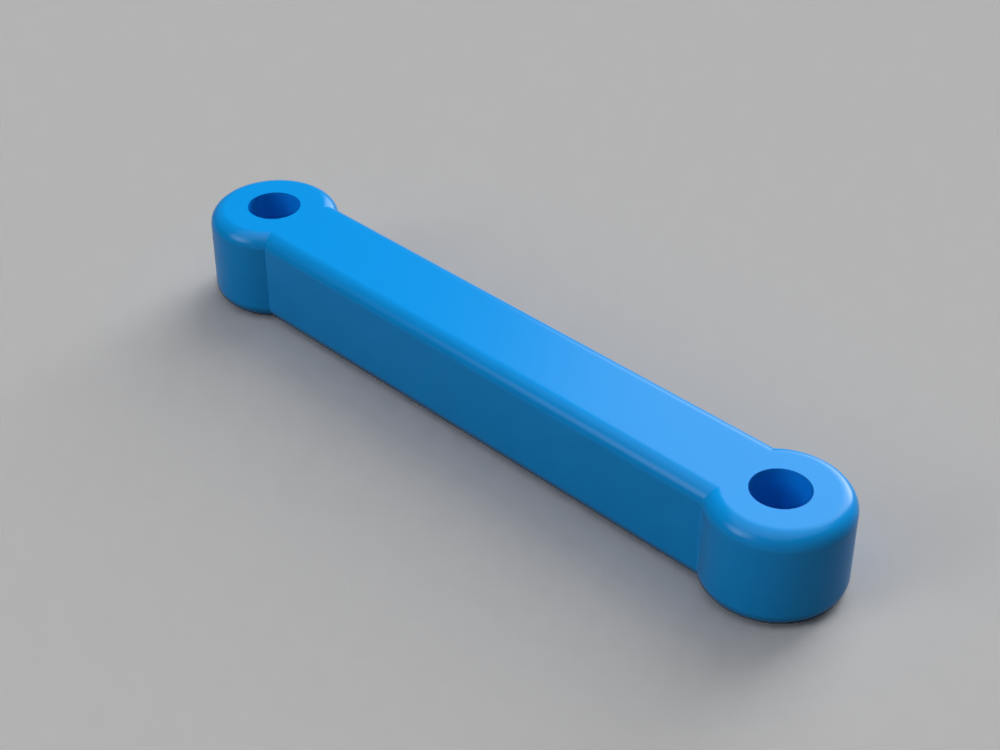 Pivot Arm B Số lượng: 2 |
 Chân đế Số lượng: 4 |
Số lượng đúng Gripper: 1 |
Số lượng cơ sở cổ tay : 1 |
 Gripper Trái Số lượng: 1 |
 Gripper Bottom Plate Số lượng: 1 |
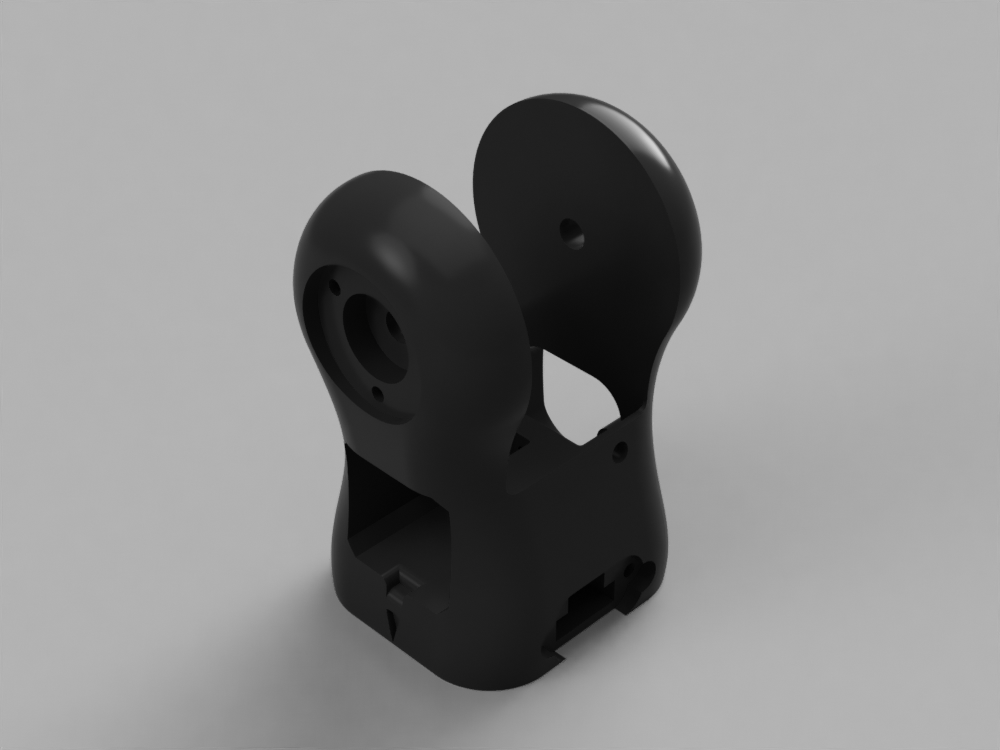
 Cổ tay nửa số lượng: 1 |
Số lượng xi lanh : 2 |
 Vai chính số lượng: 1 |
 Cổ tay nửa số lượng: 1 |
 Khuỷu tay chính số lượng: 1 |
 Elbow Joint Half Số lượng: 1 |
 Elbow Joint Half Số lượng: 1 |
 Vai 1 số lượng: 1 |
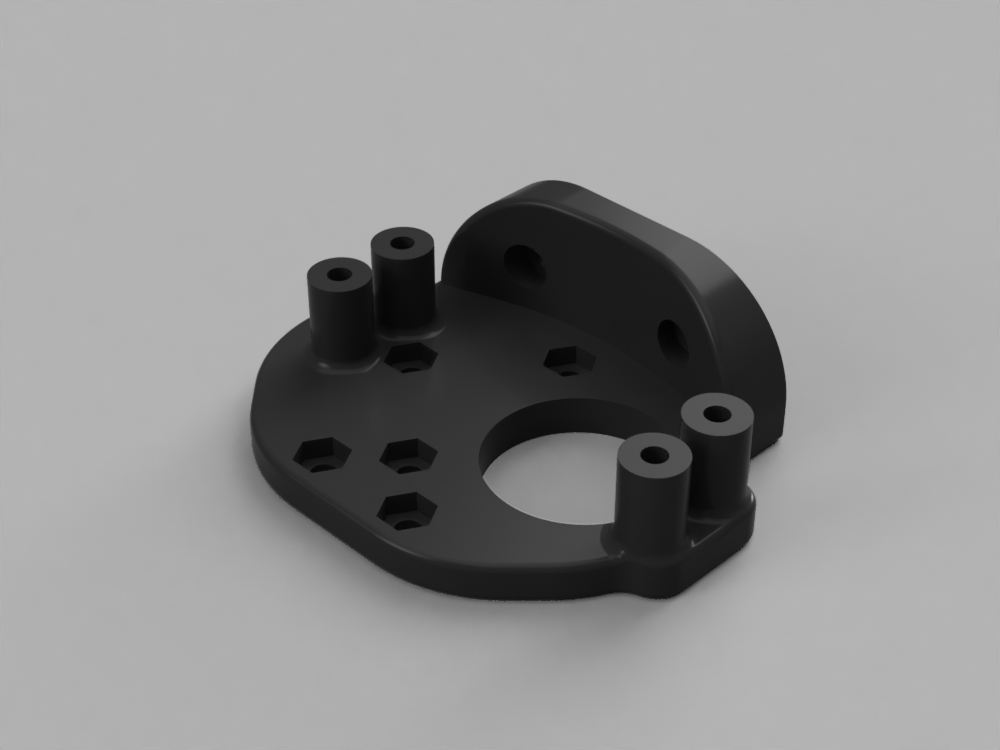
 khung Motor Mount Số lượng: 1 |
 Vai 2 số lượng: 1 |
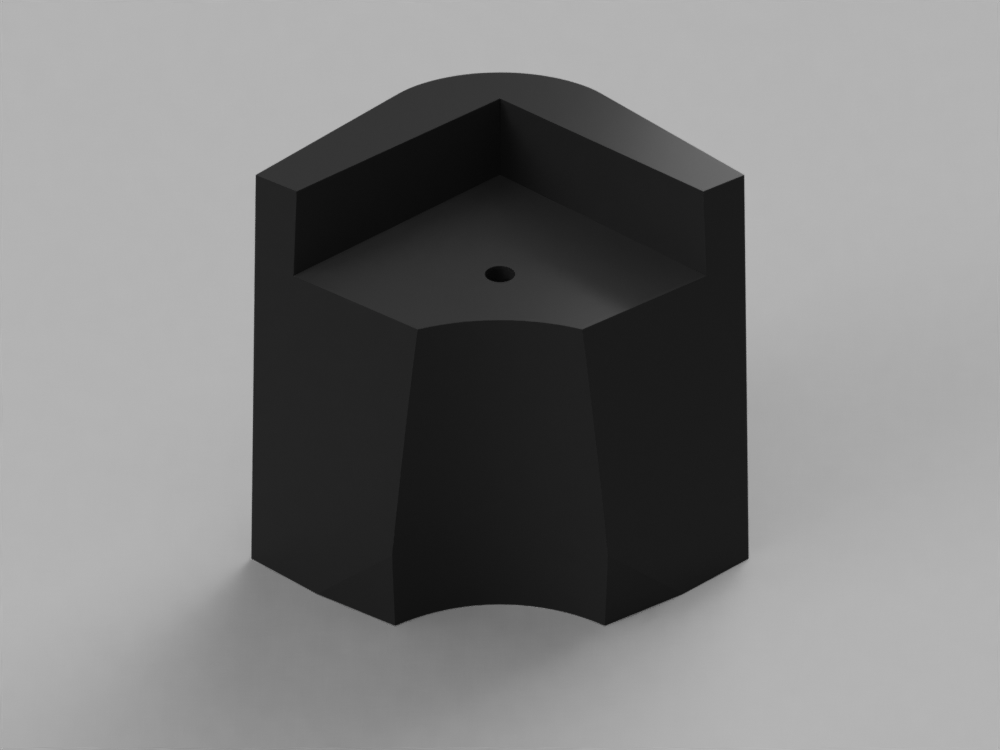
Số lượng trục quay : 1 |
Số lượng khung quay : 1 |
Bước 2: Lắp bộ nhiệt vào trục xoay chính



Hầu hết các chi tiết của cánh tay robot kết nối với nhau bằng cách lắp bộ nhiệt và vít máy. Bộ nhiệt giúp them các chi tiết vào lỗ trong các chi tiết in 3D. Sau khi ép chúng vào vị trí bằng cách sử dụng một cây hàn được làm nóng tới 230oC, như hình.

Bước 3: Thêm vòng bi 8mm vào trục xoay chính






Để robot chuyển động với ma sát thấp, chúng ta sẽ lắp hai vòng bi vào trục xoay chính. Sau đó, một trục sẽ kết nối tâm quay với trục xoay chính và hai vòng bi này sẽ cho phép nó quay tự do. Bạn có thể thực hiện theo hình. Sau đó, chỉ cần lặp lại quá trình này ở mặt dưới của trục xoay chính.

Bước 4: Gắn vòng bi vào trục xoay chính




Cánh tay robot quay trên đỉnh của trục xoay chính. Trong bước này, chúng tôi sẽ lắp vòng bi vào trục xoay chính cho phép cánh tay xoay mượt hơn. Các vòng bi nhô ra trên đỉnh của trục xoay chính.
Sử dụng ốc vít M5 x 14mm, gắn vòng bi 5mm vào mỗi bộ nhiệt trên trục xoay chính. Vặn chặt các vít đủ để các vòng bi không bị lung lay, nhưng không quá chặt đến mức vòng bi không thể di chuyển trơn tru.
Trong hình dưới hướng dẫn cách lắp các vòng bi và ốc ít nếu bạn vẫn chưa lắp được.
Video dưới đây để kiểm tra độ mượt của các vòng bi.
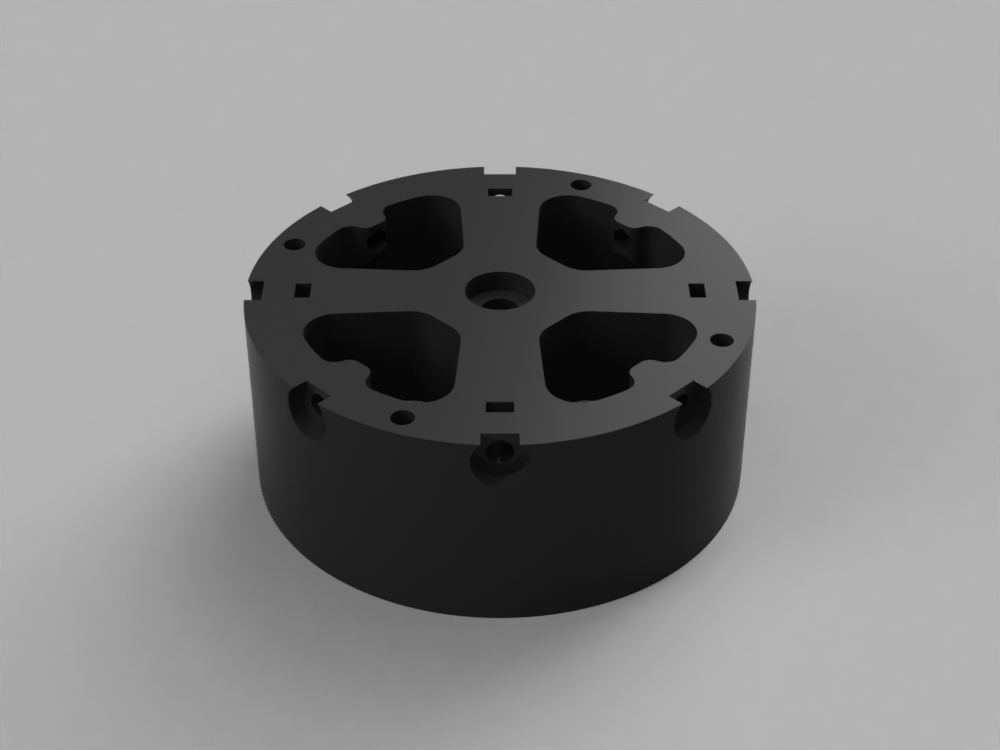
Bước 5: Lắp đặt bộ nhiệt cho trục quay




Chi tiết trục quay sẽ được gắn vào đế của cánh tay robot. Để tạo thành kết nối, chúng ta cần sử dụng các bộ nhiệt, giống như chúng ta đã làm ở bước trên. Trong bước này, chúng tôi lắp tổng cộng sáu bộ nhiệt M4 vào phần trên của trục quay. Bạn có thể lắp theo hình dưới kèm theo cây hàn đang được làm nóng ở 230 độ.
Nếu vẫn chưa lắp được bạn có thể xem video và làm theo.
Bước 6: Lắp ráp động cơ trục chính





Tiếp theo, lắp động cơ Nema 17 vào khung servo (dài 60mm) và giữ cố định bằng 4 ốc vít M3 x 10mm kèm theo servo.
Bước 7: Nối đai ròng rọc vào trục chính của servo




Lắp các đai ròng rọc T5 vào động cơ để di chuyển các trục quay. Các ròng rọc T5 không dùng vít cố định. Do đó, chúng ta sẽ dán ròng rọc vào trục như hình.
Bước 8: Lắp bộ nhiệt vào khớp vai


Tiếp theo chúng ta sẽ lắp phần “vai” cho cánh tay robot. Vai, là một phần chính của cánh tay, chứa hai động cơ bước Nema 23 lớn, đai và cụm bánh răng lớn trong cánh tay. Thực hiện theo hình sau.

Bước 9: Lắp 2 chi tiết khớp vai với nhau

Với bộ nhiệt được lắp trong một nửa của khớp vai, chúng ta có thể lắp hai nửa với nhau. Chỉ cần đặt hai nửa khớp với nhau và nối chúng bằng bốn ốc vít M4 x 55mm.

Bước 10: Lắp bộ nhiệt vào khớp nối vai

Chúng ta cần lắp 4 bộ nhiệt vào cụm khớp nối vai như hình trên.

Bước 11: Thêm dây đai vào khớp vai


Chúng tôi đang ở bước cuối cùng trong việc chuẩn bị khớp vai trước khi chuyển sang các phần khác của cánh tay robot. Điều cuối cùng cần làm là gắn các dây đai T5 vào khớp vai để chúng sẵn sàng khi chúng ta lắp ráp các bước tiếp theo.
Cắt hai dây đai dài 36cm của đai T5. Sau đó, với mỗi dây đai, trượt đầu vào các khe trong khớp vai. Bây giờ các dây đai chỉ gắn tạm lên khớp vai.
Bước 12: Lắp bộ nhiệt vào đế vai






Trong bước này, chúng ta sẽ lắp các bộ nhiệt vào đế vai để lắp tất cả các chi tiết khác. Hãy lắp theo hình cũng nhờ cây hàn như các bước trên.

Bước 13: Lắp thêm hai bộ nhiệt vào đế vai
Thực hiện theo hình.

Các bộ nhiệt nên được lắp đặt sao cho chúng song song với đáy của trục quay. Nói cách khác, khi vít được lắp vào bộ nhiệt, nó phải nằm ngang.
Bước 14: Lắp bộ vòng bi chính






Đầu tiên, đặt ba vòng bi 4mm x 13mm x 5mm vào khung. Sau đó, lắp một vít M4 x 20mm qua toàn chi tiết. Cuối cùng, lắp đai ốc khớp với khung lục giác trên chi tiết in 3D và vặn vít chặc lại.
Tiếp theo, lắp một đai ốc M3 vào phần hong có khung lục giác như hình.
Bước 15: Lắp các chi tiết vào đế vai
Đầu tiên, lắp 2 vít M3 x 25mm vào 2 bên đế như hình.

Tiếp theo, lắp 2 bộ vòng bi vào 2 vít như hình.

Bước 16: Thêm động cơ Nema 23 vào đế vai

Lắp 2 động cơ vào 2 bên đế vai như hình. Để lắp đặt động cơ, chỉ cần vít chúng vào vị trí bằng bốn ốc vít M5 x 14mm.

Bước 17: Thêm đai ròng rọc vào động cơ Nema 23

Với hai động cơ Nema 23 gắn trên dê vai, chúng ta có thể lắp hai đai ròng rọc T5. Giống như ròng rọc mà chúng tôi đã lắp trên động cơ chính ở trên, chúng ta sẽ tạo thành kết nối giữa ròng rọc và trục động cơ bằng cách sử dụng keo dán.

Bước 18: Gắn khớp vai vào đế vai







Trong bước này, chúng tôi sẽ lắp khớp cánh tay robot bằng cách gắn khớp vai lên đế vai. Một thanh trơn 8mm x 140mm sẽ chạy qua giữa khớp vai, được hỗ trợ bởi hai vòng bi ở đế vai.

Trước tiên, sử dụng súng nhiệt của bạn khi nhựa đủ ấm để linh hoạt, nhấn một vòng bi 8mm x 22mm x 7mm vào mỗi bên của chi tiết theo hình.
Tiếp theo chúng ta cần gắn khớp vai lên đế vai bằng cách trượt một thanh trơn thông qua các vòng bi ở hai bên của đế vai và luồng qua khớp vai, cùng lúc, quấn dây đai xung quanh ròng rọc trên động cơ.
Cách dễ nhất để làm điều này là đầu tiên lắp khớp vai vào đế vai, sau đó nối dây đai từ khớp vai xung quanh ròng rọc trên động cơ Nema 23.
Cuối cùng, nâng khớp vai và chèn thanh trơn thông qua giữa.

Bước 19: Chèn vít M4 x 20mm vào đế vai như hình

Lưu ý, vặn vít vào mỗi vít cho đến khi dây đai đủ chặt để nó không trượt trên ròng rọc khi bạn di chuyển khớp vai, nhưng không quá chặt đến nỗi khớp vai khó di chuyển. Bạn có thể chỉnh độ căng tùy ý.

Bước 20: Lắp nắp che
Mỗi bên của thanh trơn sẽ được “ẩn” bằng một nắp in 3D. Sau đó, dùng 3 vít M3 x 10mm để cố định chúng.

Bước 21: Lắp bộ nhiệt vào khuỷu tay theo hình


Bước 22: Lắp ráp đai khuỷu tay
Đầu tiên sử dụng súng nhiệt để làm sâu lỗ hình lục giác cho đai ốc M4. Khi bộ phận trở nên linh hoạt, hãy ấn đai M4 vào.
Thứ hai, xếp ba vòng bi 8mm x 22mm x 7mm với nhau và giữ chúng vào khung với vít M4 x 20mm.
Bước 23: Nối đai ốc vào khuỷu tay như video


Bước 24: Gắn khung khuỷu tay vào khớp vai
Trong bước này, chúng tôi sẽ đoàn kết các cơ sở khuỷu tay và lắp ráp vai. Bạn đã có thể nhận thấy rằng lắp ráp khuỷu tay chưa hoàn thành vì nó thiếu động cơ. Điều này là do động cơ chặn hai ốc vít nối khuỷu tay với khớp vai vì vậy chúng ta cần nối hai phần này trước và lắp đặt động cơ trong bước tiếp theo.
Dùng bốn vít M4 x 10mm để nối khuỷu tay với khớp vai.

Bước 25: Gắn khung đai khuỷu tay
Với đai ốc cố định tại chỗ và khuỷu tay nối với khớp vai, chúng ta có thể lắp đai khuỷu tay mà không ảnh hưởng đến bất kỳ phần nào khác mà chúng ta cần ghép lại với nhau. Chỉ cần đặt khung đai vào khe trong khuỷu tay, chèn một vít M3 x 40mm qua khuỷu tay và đai rồi vặn nó vào đai ốc.

Bước 26: Thêm vòng bi vào giữa khuỷu tay


Đầu tiên chúng ta cần phải làm nóng lỗ cho các vòng bi bằng súng nhiệt cho đến khi nhựa đủ mềm để chèn vòng bi.

Bước 27: Lắp động cơ
Lắp động cơ khuỷu tay rất đơn giản. Chỉ cần lắp động cơ vào bên trái của khuỷu tay. Sau đó, hãy gắn chặt nó với bốn ốc vít M3 x 10mm.

Bước 28: Thêm đai ròng rọc vào động cơ khuỷu tay
Tiếp theo chúng ta cần phải nối một đai ròng rọc vào động cơ khuỷu tay. Đầu tiên, nhỏ keo vào lỗ khoan ròng rọc. Sau đó, nhấn đai ròng rọc vào trục động cơ khuỷu tay cho đến khi nó khớp với đai khuỷu tay.

Bước 29: Lắp bộ nhiệt vào khớp khuỷu tay
Có tổng cộng sáu bộ nhiệt M3 cần thiết cho khớp khuỷu tay. Làm theo video và hình bên dưới.
Bước 30: Gắn động cơ cổ tay 1 vào khớp khuỷu tay
Trước khi lắp động cơ vào khớp khuỷu tay, chúng ta cần gắn bộ nối trục và trục 8mm vào động cơ. Bộ nối trục có lỗ 5mm ở một bên và lỗ 8mm ở mặt kia. Gắn bộ ghép trục vào động cơ với khoảng cách 2mm giữa bộ nối và thân trục. Siết chặt các vít đã đặt để giữ bộ nối tại chỗ.
Tiếp theo, lắp một thanh ren có rãnh 8mm x 40mm vào bộ nối trục và siết chặt các vít để giữ thanh tại chỗ.
Bây giờ chúng ta có thể đặt động cơ chính vào khớp khuỷu tay. Để thực hiện điều này, chỉ cần đặt cụm động cơ vào hình chữ nhật trong khớp khuỷu tay với các dây động cơ hướng lên trên. Nếu bộ nối trục không vừa khít, bạn có thể cần phải điều chỉnh vị trí của nó trên trục động cơ.
Sau đó, đặt một vòng bi 8mm x 22mm x 7mm vào thanh ren 8mm. Và cuối cùng, để gắn động cơ vào khớp khuỷu tay, hãy sử dụng hai ốc vít 3mm x 10mm được thêm vào phần cuối của phần khớp khuỷu tay.
Bước 31: Lắp hoàn chỉnh khuỷu tay
Việc đầu tiên cần làm là xử lý các dây dẫn từ động cơ cổ tay. Trên khuỷu tay có một lỗ để luồng các dây trên động cơ. Trước tiên hãy luồn dây cáp qua lỗ này.
Sau đó, chỉ cần đặt hai nửa của khớp khuỷu tay lại với nhau, và sử dụng sáu ốc vít M3 x 50mm nối hai phần lại với nhau.
Bước 32: Thêm dây đai vào khớp khuỷu tay



Cũng giống như đã làm với các khớp vai, chúng ta cần phải thêm dây đai T5 vào khớp khuỷu tay trước khi gắn nó vào khuỷu tay. Ấn một đầu của đai T5 dài 46cm vào một bên của khớp khuỷu tay. Sau đó, quấn dây đai và ấn đầu kia của dây đai vào vị trí. Bây giờ dây đai sẽ như hình.
Bước 33: Gắn khớp khuỷu tay vào khuỷu tay





Bây giờ khớp nối khuỷu tay đã được lắp ráp hoàn chỉnh, bao gồm cả dây đai T5, chúng ta có thể gắn nó vào khuỷu tay. Quá trình thực hiện điều này rất giống với khi chúng ta gắn khớp vai lên đế vai.
Đầu tiên, đặt phần khớp khuỷu tay vô trong khuỷu tay mà không cần chèn thanh trơn. Khi dây đai được đặt đúng vị trí, hãy nâng phần khớp khuỷu tay vào đúng vị trí của nó, với lỗ ở giữa phần lót với các vòng bi ở hai bên của khuỷu tay. Cuối cùng, đặt một thanh trơn 8mm x 115mm qua toàn bộ cụm.

Bước 34: Gắn nắp vào khuỷu tay như hình

Bước 35: Lắp bộ nhiệt vào cổ tay
CHúng ta sẽ chèn tổng cộng chín bộ nhiệt M3 vào cổ tay. Sáu cái đầu tiên chèn vào 2 khung tròn 2 bên của cổ tay.

Tiếp theo, chúng ta sẽ chèn ba bộ nhiệt còn lại vào mặt sau của cổ tay theo hình và video.


Bước 36: Chèn vòng bi vào cổ tay
Tiếp theo, chúng tôi sẽ chèn hai vòng bi vào cổ tay để giúp cho khớp cổ tay di chuyển trơn tru. Lắp hai vòng bi này cũng giống như lắp vòng bi trên vai và khuỷu tay.

Bước 37: Gắn đai ốc vào cổ tay

Phần Cơ sở Cổ tay, giống như tất cả các khớp nối khác, có đai căng để điều chỉnh độ căng trên đai truyền động khớp Cổ tay.
Với đai ốc được đặt ở đầu của vít M3, ấn đai ốc vào lỗ cắt. Sau khi đợi nhựa nguội và khóa đai ốc tại chỗ, tháo vít M3.
Bước 38: Lắp ráp đai cổ tay
Đầu tiên, sử dụng súng nhiệt làm ấm lên lỗ hình lục giác ở một bên của chi tiết đai in 3D. Khi nhựa mềm, nhấn một đai ốc M3 vào lỗ.
Tiếp theo, xếp chồng ba vòng bi 3 mm x 10mm x 4mm vào giữa đai. Giữ cụm lắp ráp cùng với vít M3 x 20mm.
Bước 40: Lắp đai cổ tay vào cổ tay theo hình

Bước 41: Gắn động cơ cổ tay 2
Chỉ cần lắp một động cơ bước bên trái cổ tay, động cơ bước Nema 14. Động cơ gắn vào phần Cổ tay ở phía đối diện với đai căng. Nếu bạn nhìn kĩ vào phần này, bạn sẽ thấy một vết cắt nhỏ ở phần dưới cùng. Để gắn động cơ cổ tay vào, chỉ cần đặt nó vào ô vuông và cố định nó với bốn ốc vít M3 x 10mm.

Bước 42: Nối cổ tay và khớp khuỷu tay
Đầu tiên, nếu bạn nhìn vào mặt sau của cổ tay, bạn có thể thấy một loại lỗ hình chữ “T”. Trong phần rộng hơn của lỗ, chèn một vòng bi 8mm x 22mm x 7mm. Nhấn ổ bi vào lỗ cho đến khi có lỗ 8mm trên đáy của cổ tay. Tiếp theo, trong phần nhỏ hơn của lỗ hình chữ “T”, trên đỉnh ổ bi, hãy lắp đai ốc M8.
Với ổ bi và đai ốc được lắp đặt, hãy vít Chân đế vào thanh ren từ khớp khuỷu tay. Siết chặt cổ tay càng nhiều càng tốt cho đến khi động cơ cổ tay bắt đầu quay cùng với cổ tay.

Bước 43: Lắp khung nắp cho cổ tay
Để kết nối nắp, chỉ cần vít nó vào vị trí bằng cách sử dụng hai ốc vít M3 x 10mm.

Bước 44: Thêm vành đai ròng rọc vào động cơ cổ tay
Với các động cơ cổ tay, chúng ta cần phải thêm một đai ròng rọc để điều khiển khớp cổ tay.

Bước 45: Lắp bộ nhiệt vào khớp cổ tay
Có tổng cộng bảy bộ nhiệt M3 được lắp vào khớp cổ tay. Ba bộ nhiệt đầu tiên sẽ được sử dụng để lắp hai nửa của khớp cổ tay với nhau. Những bộ nhiệt này sẽ được lắp vào khớp cổ tay không có răng lắp đai.

Bước 46: Vặn chặt các khớp nối cổ tay
Với bộ nhiệt được lắp vào một nửa của khớp cổ tay, bây giờ chúng ta có thể lắp hai nửa lại với nhau. Chỉ sử dụng ba vít M3 x 25mm để nối chúng với nhau.
Bước 47: Lắp bộ nhiệt vào đế của khớp cổ tay

Bước 48: Lắp dây đai vào khớp cổ tay

Gắn một dây đai T5 dài 18mm vào khớp cổ tay giống như cách gắn đai vào khớp vai và khớp khuỷu tay, bằng cách nhấn đầu của dây đai vào đúng khớp của phần răng ở trung tâm của cổ tay.
Bước 49: Gắn khớp cổ tay vào cổ tay





Đầu tiên là đặt khớp nối cổ tay vào đế cổ tay và quấn dây đai T5 quanh ròng rọc. Giữ dây đai tại chỗ, nâng khớp cổ tay vào đúng vị trí của nó và gắn thanh trượt 8mm x 80mm qua chúng.

Bước 50: Gắn nắp cho khớp nối bằng ốc vít M3 x 10mm

Bước 51: Lắp vít đai cổ tay
Phần cuối cùng được lắp đặt trong Cổ tay của cánh tay robot là vít được sử dụng để điều chỉnh độ căng trên đai. Trục vít để điều chỉnh các dây đeo của đai cổ tay được lắp vào bộ chèn nhiệt đặt phía sau đai cổ tay. Chỉ cần vít một vít M3 x 20mm vào bộ nhiệt này và xiết chặt nó cho đến khi đai đạt đến độ căng thích hợp.

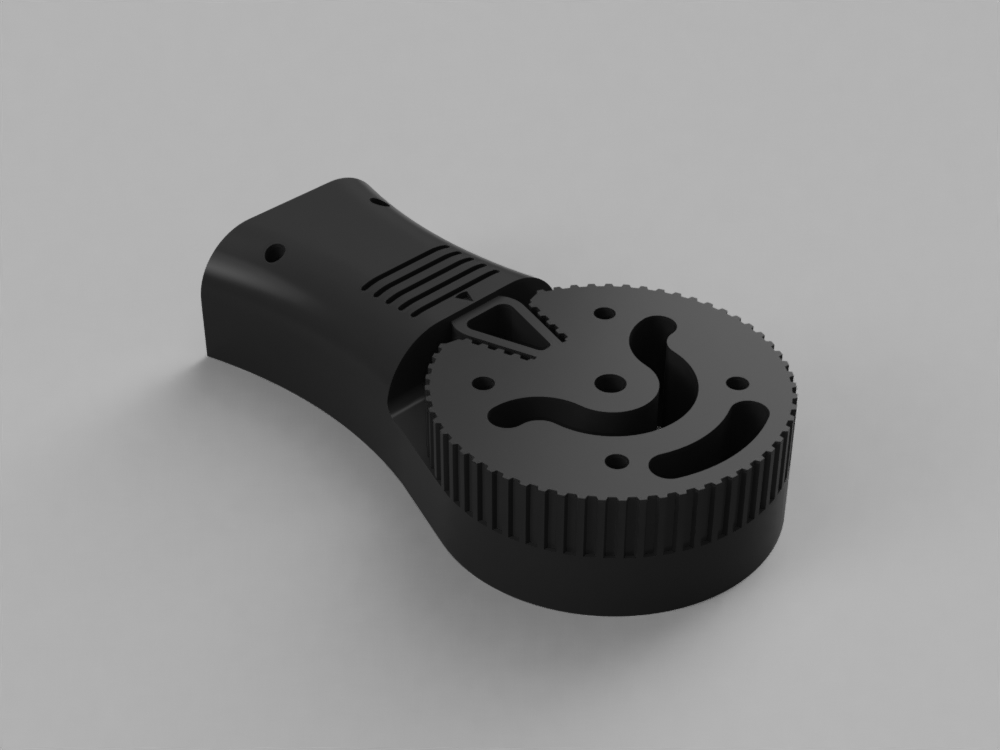
Bước 52: Lắp 5 bộ nhiệt vào phần dưới của kẹp

Bước 53: Gắn 6 ốc vít M3 x 16mm và 4 vòng đệm vào đầu đĩa kẹp

Bước 54: Luồng bộ phận chuyển động kẹp và vòng đệm
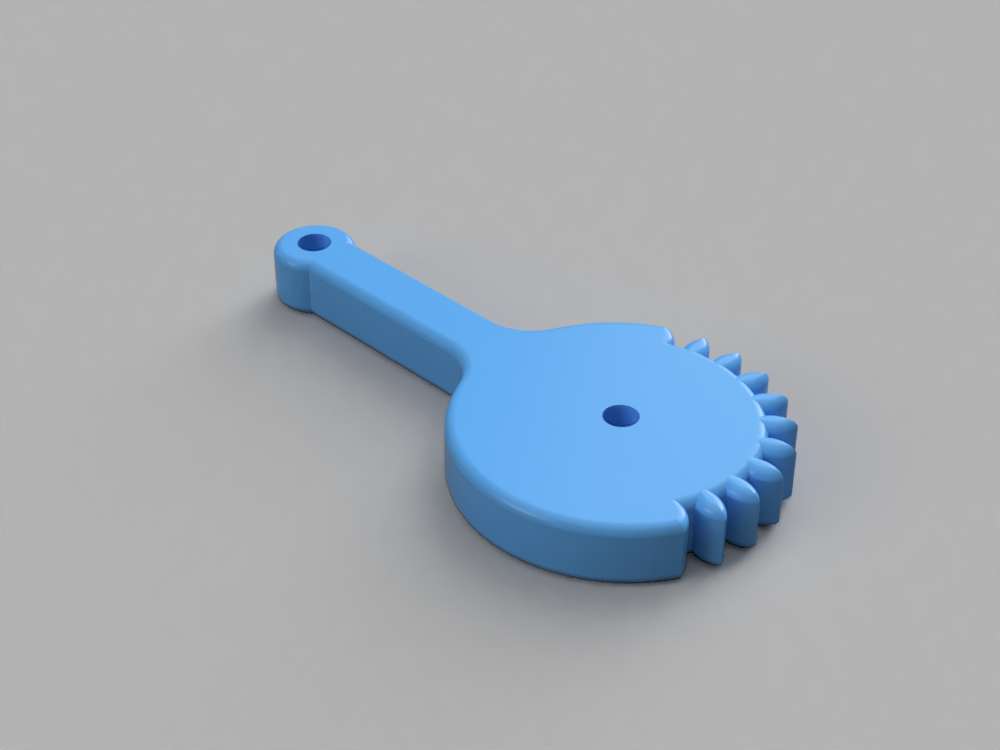
Đầu tiên, thêm hai chi tiết đệm in 3D vào hai vít ở giữa kẹp. Có hai chi tiết không có bánh răng được lắp vào hai ốc vít có khoảng cách gần nhau hơn các vít khác.
Có hai chi tiết có bánh răng. Một có một lỗ ở giữa và cái kia có ba lỗ. Trong bước này, chúng ta sẽ lắp cánh tay có một lỗ. Xem hình để dễ hình dung cách lắp ráp hơn.
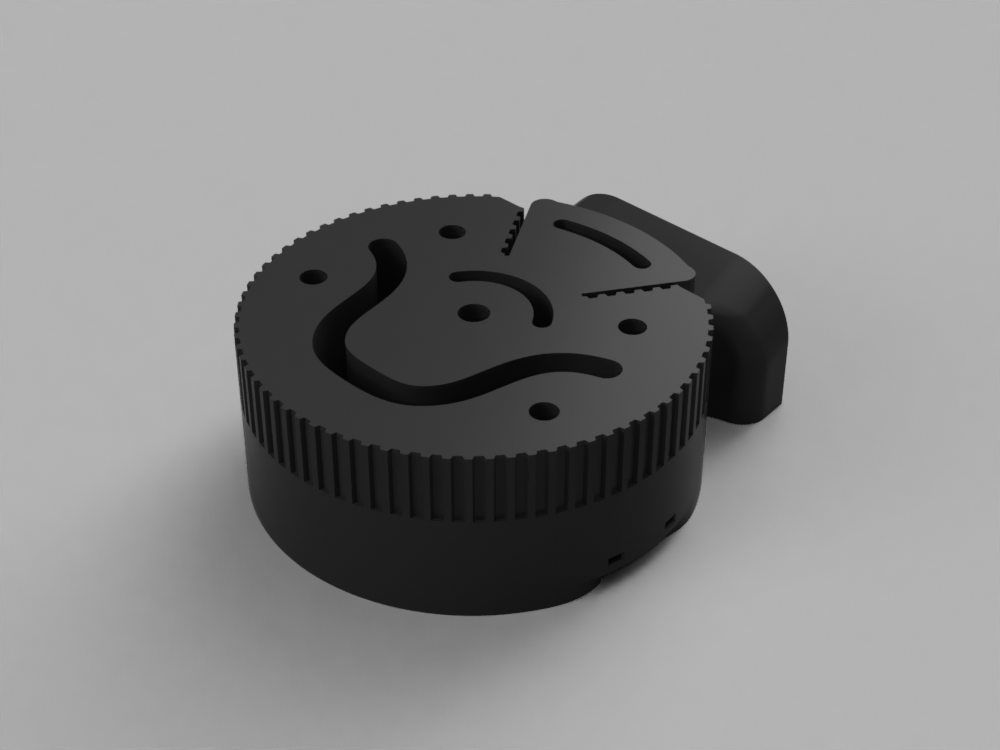
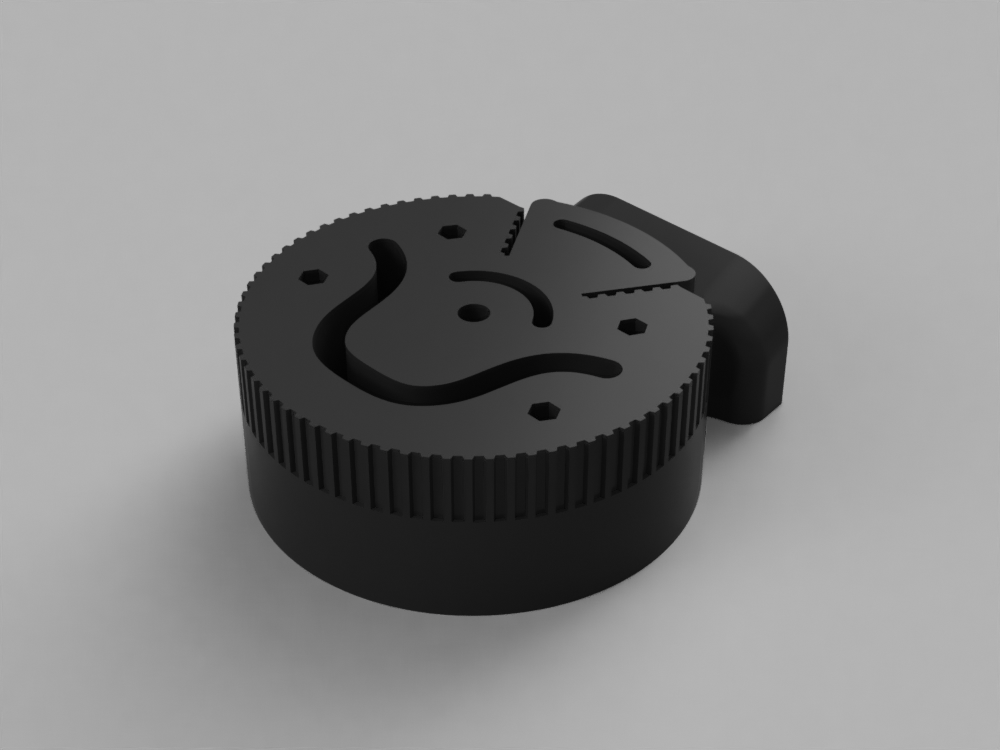
Bước 55: Lắp bộ nhiệt vào chi tiết kẹp bánh răng 3 lỗ


Bước 56: Thêm chi tiết trên vào đĩa kẹp
Bước 57: Gắn khung đáy vào đĩa kẹp
Bước 58: Chèn bộ nhiệt vào đầu kẹp
Đầu kẹp gồm 2 thanh đối nhau được điều khiển bởi một động cơ servo. Trong bước này, chèn hai bộ nhiệt M3 vào mỗi thanh kẹp.
Bước 59: Nối thanh kẹp vào kẹp
Nối hai thanh kẹp với kẹp bằng cách sử dụng các vít M3 x 16mm.
Bước 60: Lắp kẹp vào khớp cổ tay
Gắn kẹp vào khớp nối cổ tay bằng bốn bộ nhiệt trên đỉnh của khớp cổ tay . Đặt kẹp trên khớp cổ tay sao cho bốn ốc vít M3 x 10mm có thể lắp vào các bộ nhiệt của khớp cổ tay.

Bước 61: Khoan lỗ cho trục chính trên khung gỗ


Tại thời điểm này, cánh tay robot về cơ bản là hoàn thanh.
Trong bước này, chúng ta sẽ bắt đầu chuẩn bị phần đế cho cánh tay robot. Hãy cắt một miếng gỗ hình vuông có kích thước 3/4 inch mỗi bên 16 inch. Bước đầu tiên trong việc chuẩn bị khung đế là khoan một lỗ ở giữa khung. Toàn bộ cánh tay robot sẽ gắn vào đế thông qua một bu lông M8. Vì vậy, đo góc-to-góc, con số ra là trung tâm chính xác của cơ sở nằm. Khoan một lỗ 1in vào bục gỗ.
Bước 62: Khoan lỗ trên khung gỗ để cố định cánh tay

Sử dụng một mũi khoan 4mm, đặt cánh tay khớp với lỗ ỡ giữa khung gỗ và khoan qua cánh tay vào khung gỗ, có tổng cộng bốn lỗ cần khoan.
Bước 63: Khoan lỗ cho chân đế
Mỗi chân gắn trên mỗi góc của khung gỗ. Một lần nữa sử dụng mũi khoan dài 4mm, đặt một chân trên mỗi góc của khung gỗ, sau đó khoan xuống qua chân để tạo ra một lỗ trên khung gỗ.
Bước 64: Lắp bộ nhiệt M4 vào chân đế


Bước 65: Gắn chân đế vào khung gỗ



Với bộ nhiệt được lắp vào mỗi Chân đế và các lỗ lắp ráp được khoan vào khung gỗ, bây giờ chúng ta có thể gắn Chân đế. Đầu tiên đặt chân dưới bục. Đặt vòng đệm lên bốn vít M4 x 40mm. Sau đó, sử dụng các vít để gắn chân vào bục.
Bước 66: Gắn đế quay lên khung gỗ




Đầu tiên là thêm các vít gắn vào đế quay. Lắp bốn ốc vít M4 x 55mm vào bốn lỗ lắp xung quanh phần ngoài của đế quay.
Sau đó, lắp đế quay vào khung gỗ
Cuối cùng, cố định đế quay trên khung gỗ bằng cách sử dụng vòng đệm và đai ốc trên mỗi vít gắn.
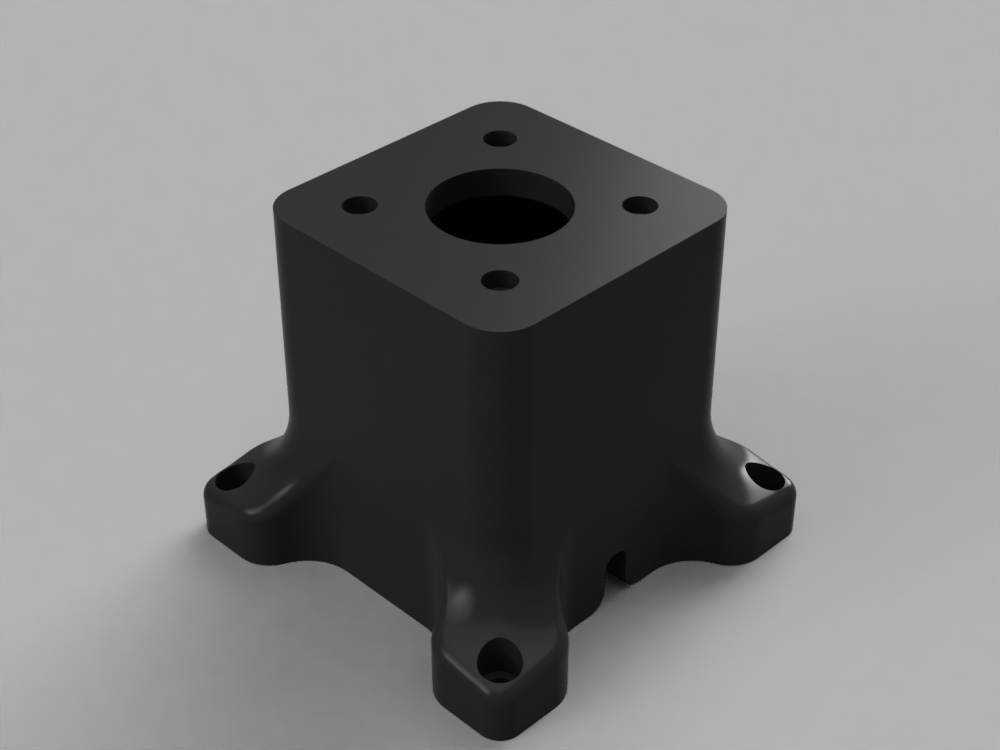
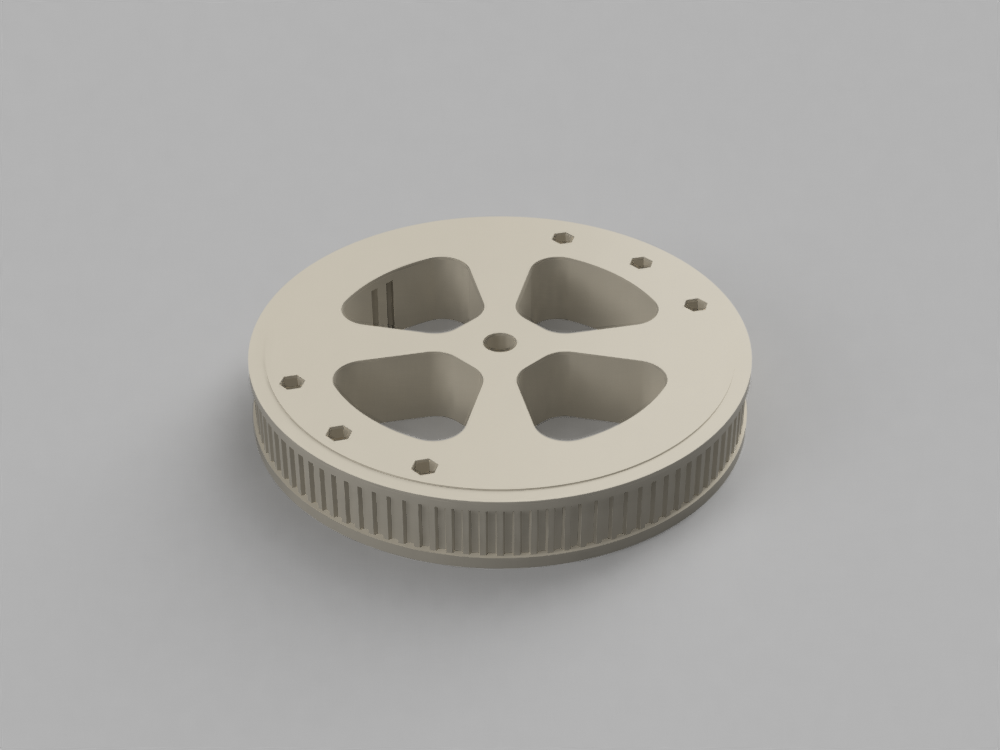
Bước 67: Gắn trục cho đế quay





Ở mặt bên của đế quay, bạn sẽ thấy rằng ở giữa có một hình lục giác cho đầu trên bu lông M8. Để lắp đặt trục chi tiết tiếp theo, chỉ cần nhấn một bu lông M8 x 65mm vào lỗ ở giữa khung.
Bước 68: Thêm dây đai vào đế quay


Gắn dây đai T5 dài 65cm vào khớp giữa đế quay như hình.
Bước 69: Lắp đế quay vào trục quay


Với trục quay và đai ròng rọc, trong bước này, chúng ta có thể gắn đế quay vào trục quay. Đầu tiên, đặt trục quay vào đế quay bằng bu lông M8 qua các vòng bi trong trục quay. Sau đó, chèn một đai ốc M8 thông qua các lỗ ở giữa của khung gỗ.
Bước 70: Lắp khung động cơ lên khung gổ và nối với dây đai như hình


Điều chỉnh vị trí của đai động cơ cho đến khi dây đai đủ chặt để tránh trượt nhưng không quá chặt đến mức động cơ không thể di chuyển. Sau đó, với động cơ được đặt ở vị trí bạn muốn, hãy khoan bốn lỗ thông qua các lỗ gắn trong khung động cơ.
Cuối cùng, cố định động cơ trên khung gỗ bằng bốn ốc vít M4 x 45mm, với vòng đệm và đai ốc ở mặt dưới của khung gỗ.
Bước 71: Lắp cánh tay robot lên phần đế quay

Cánh tay robot gắn vào đế quay bằng sáu ốc vít M4 x 40mm sẽ nối vào bộ nhiệt đã lắp vào đế quay từ trước. Vì vậy, chỉ cần đặt cánh tay robot lên đế quay với sáu lỗ thẳng hàng. Sau đó, vặn chặt cánh tay robot bằng các vít M4 x 40mm.
Bước 72: Đường dẫn cổ tay và cáp động cơ khuỷu tay





Bạn có thể thấy một vài vết cắt nhỏ ở mặt sau của phần khớp vai và khớp khuỷu tay. Đây là để dẫn dây cáp. Để tránh các dây cáp rơi vào các khớp và bị rối hoặc bị cắt, chúng ta sẽ sử dụng các vết cắt để giữ dây cách xa các khớp nối.
Đầu tiên, đặt một zip-tie thông qua hai khe nhỏ ở hai bên rồi thắt chặt các zip thành vòng để giữ dây tại chỗ. Sau đó, chỉ cần đặt dây vào các lỗ và thắt chặt các dây buộc để giữ dây tại chỗ.
Bước 73: Lắp ráp bộ điều khiển





Bộ điều khiển cho cánh tay robot bao gồm một số chi tiết:
- Đối với bộ điều khiển, chúng ta sẽ sử dụng Arduino Mega 2560.
- Để Arduino giao tiếp với các động cơ trên cánh tay robot, chúng ta sẽ sử dụng một RAMPS shield. Nó thường được sử dụng như một phần của thiết bị điện tử điều khiển máy in 3D. Máy in 3D sử dụng một số động cơ bước để di chuyển giống như cánh tay robot, vì vậy RAMPS shield hoạt động rất tốt để điều khiển cánh tay robot.
- Cuối cùng, chúng tôi sử dụng trình điều khiển stepper DRV8825. Một số động cơ bước trên cánh tay robot lớn hơn so với các động cơ được sử dụng trên máy in 3D. Vì vậy, thay vì các trình điều khiển thường được sử dụng cho một máy in 3D, chúng tôi sẽ sử dụng trình điều khiển DRV8825 cho dự án này bởi vì chúng có thể xử lý dòng cao hơn nhiều so với các trình điều khiển phổ biến.
Lắp ráp:
Đầu tiên, đặt RAMPS shield lên Arduino Mega. RAMPS shield nên được định hướng với các thiết bị terminal trên cùng một bên như cổng USB trên Arduino.
Với RAMPS shield gắn trên bảng Arduino, chúng ta gắn thêm các trình điều khiển stepper DRV8825. Khi gắn các trình điều khiển động cơ bước vào bo mạch RAMPS, các mô-đun phải được đặt gần các đầu nối vít nguồn của RAMPS.
Bước 74: Cố định bộ điều khiển vào khung gỗ bằng hai ốc vít M4 x 40mm và hai đai ốc M4 như hình




Bước 75: Nối dây động cơ và servo




Dây động cơ phần cổ tay của cánh tay robot không đủ dài để đến được bộ điều khiển. Vì vậy, trong bước này, chúng ta sẽ hàn dây dài hơn vào dây để có thể kết nối chúng với bộ điều khiển trong bước tiếp theo, chỉ cần hàn thêm dây 50cm vào mỗi dây trên động cơ. Sử dụng ống co lại vào các khớp hàn để bảo vệ chúng và ngăn ngắt mạch.
Bước 76: Nối dây cái vào cáp động cơ




Nên sử dụng các dây màu khác nhau để thuận tiện trong quá trình nối mạch.
Bước 77: Bọc cáp

Để tất cả các dây cáp trên robot thật gọn gàn và tránh các dây bị rối hoặc bị kẹt trong bất kỳ khớp nối của cánh tay robot nào, chúng tôi sẽ quấn dây để gắn chúng lại với nhau. Đối với dự án này, tôi thích sử dụng một sản phẩm quản lý cáp xoắn ốc bọc bởi vì các loại bọc xoắn ốc linh hoạt hơn các loại ống chia.
Bước 78: Nối dây cánh tay Robot





Đầu tiên, vì cả hai động cơ vai sẽ làm việc cùng nhau để di chuyển cánh tay, chúng sẽ nối với cùng một động cơ. Vì trình điều khiển động cơ duy nhất trên RAMPS với hai bộ kết nối là trình điều khiển Z-Axis, các động cơ vai sẽ kết nối với trình điều khiển đó. Với dây màu xanh gần nhất với các đầu nối vít nguồn, kết nối hai động cơ vai với các chân bên cạnh trình điều khiển động cơ bước Z-Axis.
Thứ hai, nối động cơ khuỷu tay với bộ điều khiển động cơ bước Y-Axis với dây màu xanh gần nhất với các đầu nối vít nguồn.
Thứ ba, nối động cơ cổ tay đầu tiên với trình điều khiển động cơ X-Axis.
Thứ tư, nối động cơ cổ tay thứ hai với bộ điều khiển động cơ bước E.
Cuối cùng, động cơ cuối cùng còn lại để được kết nối là động cơ servo trên kẹp.
Bước 79: Gắn nguồn cung cấp điện



Nguồn cung cấp sẽ gắn trên mặt dưới của khung gỗ. Các lỗ lắp trên nguồn điện được bố trí theo hình chữ nhật có kích thước 50mm x 150mm. Việc lắp đặt nguồn điện sẽ liên quan đến việc đo đạc vị trí của các lỗ. Vì vậy, vẽ một hình chữ nhật có kích thước 50mm x 150mm trên một mảnh giấy. Sau đó, đặt giấy trên khung gỗ và khoan lỗ thông qua các góc của hình chữ nhật.
Sau đó, đặt nguồn điện dưới khung gỗ và sử dụng bốn ốc vít M3 x 20mm. Các vít nên dài hơn một chút so với độ dày khung gỗ.
Bước 80: Dây RAMPS để cung cấp điện





Với nguồn điện được gắn, chúng ta có thể kết nối nguồn điện với RAMPS. Có một số thiết bị terminal trên cả nguồn cấp điện và bo mạch RAMPS.
Ráp theo hình
Bước 81: Điều chỉnh dòng điện trình điều khiển Stepper

Trước khi chúng ta chạy code điều khiển và động cơ bước di chuyển, chúng ta cần phải điều chỉnh các trình điều khiển stepper DRV8825 để chúng cung cấp chính xác dòng điện cho mỗi động cơ.
Để xác định dòng điện tối đa trên mỗi trình điều khiển stepper được cung cấp, chúng ta sẽ đo điện áp tham chiếu giữa chân dữ liệu với chân đất bằng cách sử dụng một thiết bị đo vạn năng. Xác định điện áp tham chiếu tương ứng với dòng điện mà chúng ta muốn bao gồm một phép tính rất đơn giản:
V ref = 0,5Ω * I tối đa
V ref là điện áp tham chiếu đo giữa nguồn và đất, và I max là mức dòng điện tối đa của trình điều khiển stepper.
Mỗi động cơ bước cần một lượng dòng điện khác nhau. Vì vậy, chúng tôi sẽ cần phải tính toán điện áp tham chiếu đích cho mỗi trình điều khiển stepper. Sau đó, chúng ta chỉ cần điều chỉnh các nguồn trên mỗi trình điều khiển để có được điện áp tham chiếu mong muốn.
Nema 17 (động cơ chính)
Dòng điện tối đa: 1.2A
Dòng điện chạy: 1A
V ref = 0,5 Ω * 1A
V ref = 0,5V
Nema 23 (vai)
Dòng điện tối đa: 2.8A
Dòng điện chạy: 2A
V ref = 0,5 Ω * 2A
V ref = 1V
5: 1 Geared Stepper (khuỷu tay)
Dòng tối đa: 0.4A
Dòng điện chạy: 0.3A
V ref = 0,5 Ω * 0.3A
V ref = 0,15V
Nema 17 (cổ tay)
Dòng tối đa: 0.4A
Dòng điện chạy: 0.4A
V ref = 0,5 Ω * 0.4A
V ref = 0,2V
Nema 14 (cổ tay)
Dòng điện tối đa: 0.8A
Dòng điện chạy: 0.6A
V ref = 0,5 Ω * 0,6A
V ref = 0.3V
Để thực sự đo điện áp tham chiếu, hãy kẹp một đầu của thiết bị đo vạn năng đến đầu điều chỉnh dòng. Gắn dây dẫn còn lại vào chân đất trên bảng điều khiển.
Bước 82: Lập trình Arduino

Cuối cùng cần lập trình Arduino Mega với code cần thiết để điều khiển cánh tay. Phần mềm cho cánh tay robot có sẵn trên trang GitHub cho dự án này .
Code được sử dụng để điều khiển cánh tay robot là phần mềm Marlin thường được sử dụng để điều khiển máy in 3D. Phần mềm Marlin đã được điều chỉnh bởi BCN3D để sử dụng trong dự án này.
Bước tiếp theo sẽ bao gồm thêm chi tiết về các lệnh thực tế được sử dụng để di chuyển cánh tay robot theo nhiều cách khác nhau.
Tải code cho Arduino Mega. Đầu tiên, mở tập tin Marlin.ino trong Arduino IDE. Sau đó, kết nối Arduino Mega với máy tính của bạn qua USB, nhấn nút tải lên.
Bước 83: Điều khiển cánh tay robot bằng code G
Cánh tay robot được điều khiển bằng G-Code . G-Code là một loại ngôn ngữ lập trình thường được sử dụng để điều khiển máy tính. Hầu như mọi máy in 3D và máy CNC đều có các lệnh G-Code khi hoạt động. Kết hợp Arduino và RAMPS để điều khiển robot. Về bản chất, sự kết hợp phần mềm Arduino / RAMPS / Marlin là một nền tảng cho việc diễn dịch và thực thi G-Code.
Chúng tôi sẽ sử dụng các lệnh G-Code khác nhau để di chuyển các động cơ khác nhau trên cánh tay robot.
Điều khiển vai
Cử động khuỷu tay
Điều khiển cổ tay 1
Điều khiển cổ tay 2
