1.Kết nối Mạch với cánh tay robot Moveo:
Servo myservo;
int servopin = 12;
Moveo Sử dụng 5 động cơ step và 1 servo.
Theo thứ tự từ dưới lên trên của moveo Thì ta có step X,H,Y,Z,E.
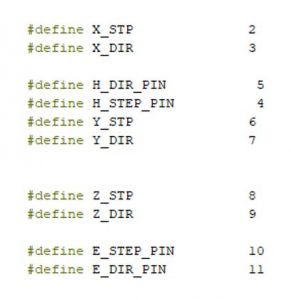
Động cơ step sử dụng driver điều khiển cncv3 shield(đấu dây enable với GND)hoặc sử dụng ramps(phải cấu hình chân trong chương trình Arduino để phù hợp với ramps).
Step H có 2 động cơ sử dụng Dm542 để điều khiển .
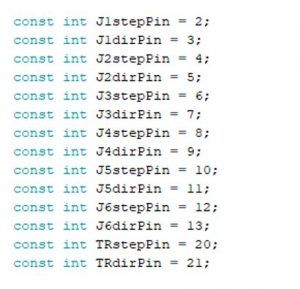
Kết nối chân Arduino theo cấu hình của chương trình Arduino.
Để sửa tỉ lệ bánh răng ta cần thay đổi tỉ lệ trong Map() trong chương trình Arduino Void chieu():

Sau khi kết nối phần cứng xong kết nối với máy tính bằng Visual Studio
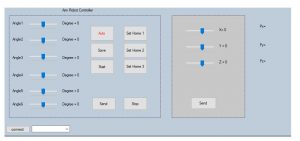
Chương trình vẫn đang trong quá trình hoàn thiện nên auto,save và set home chưa hoàn chỉnh có thể tham khảo code và lập trình thêm.
Đề nghị dung phần mềm điều khiển của Matlab để Sử dụng động học ngược và mô phỏng thay thế cho C#.
- kết nối với AR2
Ar2 sử dụng phần mềm riêng nên cấu hình theo chân của chương trình Arduino của nó.
Có thể tham khảo trên https://www.anninrobotics.com/ để tải phần mềm code và hướng dẫn.
