Trong phần này, chúng ta sẽ tạo một dự án cơ bản trong roboDK để mô phỏng và lập trinh ngoại tuyến. Trong ví dụ này, chúng ta sẽ mô phỏng và lập trình cho robot KUKA bằng phần mềm Inventor, ứng dụng vào việc đánh bóng và chà nhám. Chúng ta sẽ học được cách tạo đường dẫn robot trên bề mặt cong bằng cách tạo bản phác thảo 3D trong Inventor và nhập nó vào trong RoboDK.
Với RoboDK plug-in cho Autodesk Inventor, Chúng ta có thể dễ dàng tải các mô hình 3D được tạo trong Inventor sang RobotDK. Plug-in này cho phép chúng ta lập trình cho 50 robot được sản xuất bởi các nhà sản xuất khác nhau và 500 robot trực tiếp trên Inventor.
RoboDK Add-in cho Autodesk Inventor chỉ hoạt động với bản Inventor 2018 trở lên. Ngoài ra, phần Add-in này cũng miễn phí nếu đã có bản quyền phần mềm RoboDK.
- Ví dụ về lập trình robot đánh bóng:
- Thiết lập:
Để bẳt đầu ví dụ, chúng ta đầu tiên phải chọn ví dụ đánh bóng của RoboDK trong thư viện mặc định của phần mềm.
Ví dụ này bao gồm KUKA robot, một công cụ đánh bóng, chi tiết cần đánh bóng (Canoe) và một giá đỡ.
Mở dự án (Project):
- Chọn File➔
 Open
Open - Tìm ví dụ Đánh bóng trong phần ví dụ của RoboDK: C: /RoboDK/Examples/Plugin-Inventor-Polishing.rdk.
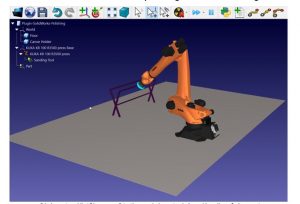
Chúng ta đã tải xong Station, chúng ta bây giờ sẽ mở Inventor.
- Tạo bản phác thảo 3D trong Inventor:
Mở vật thể 3D trong Inventor. Trong ví dụ này, đối tượng đánh bóng là một chiếc cano có bề mặt bên ngoài cong và cần được đánh bóng.
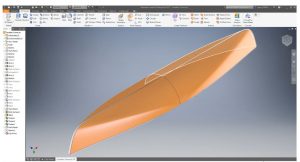
Mục tiêu của dự án này chính là tạo và nhập một đường đánh bóng trên bề mặt cong. Đường dẫn sẽ là chuyển động lên và xuống để đánh bóng phần đầu tiên của chi tiết.
Chúng ta phải tạo một mặt phẳng nghiêng 45 độ để vẽ đường lên mặt phẳng đó rồi sử dụng công cụ chiếu đường cong (Curve conjection tool) để chiếu đường từ mặt phẳng xuống mặt cong.
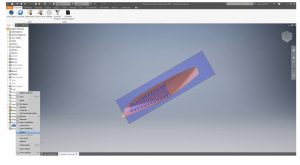
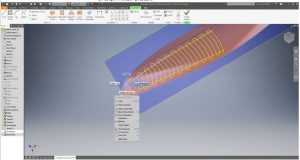
Trong ví dụ này, RoboDK đã vẽ sẵn đường dẫn. Chúng ta có thể hiện nó lên bằng cách chuột phải vào Sketch13➔Visibility trên menu bên trái như trong hình dưới đây.
Như bạn có thể thấy, đường dẫn bao gồm tất cả phần được chọn đầu tiên. Bạn có thể mở lại bản phác thảo và sửa đổi đường dẫn nếu cần bằng cách nhấp chuột phải vào Sketch13➔ Edit Sketch.
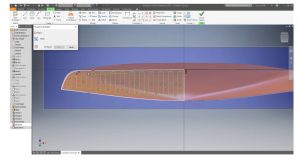
Bây giờ, thật đơn giản để chiếu đường dẫn đó lên bề mặt bằng công cụ Inventor:
- Chọn tab Sketch trong Inventor và chọn Project to 3D Sketch.
- Chọn bề mặt mà bạn muốn đường dẫn được chiếu lên.
- chọn OK và Finish Sketch.
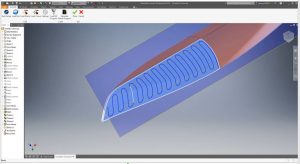
Ngay sau khi bạn chấp nhận những sửa đổi đó, một bản phác thảo 3D sẽ được tạo ra.
Hãy chắc chắn là các đường dóng (Construction line) đã được phần mềm hiểu đó là các đường dóng.
- Nhấp chuột phải vào Sketch13➔Visibility để hiển thị đường dẫn.
- nhấp chuột phải vào Sketch13➔ Edit 3D Sketch
- Chọn đường muốn kiểm tra trên mô hình 3D.
- Chọn Construction.
- Chọn Finish Sketch.
Làm theo các bước sau đây để tải bản phác thảo vào RoboDK:
- Chọn tab RoboDK trong Inventor và chọn Settings.

- Nhập vào mục Object Trong ví dụ này, nó là Canadian Canoe.
- Nhập vào mục Reference Name (Tên tham chiếu )nơi mà bạn muốn chi tiết được nhập vào phần mềm. Trong ví dụ này, nó chính là Part. Nếu bạn không cung cấp bất kỳ tên tham chiếu nào, hệ tọa độ quy chiếu đang kích hoạt sẽ được sử dụng. Nếu không có hệ tọa độ quy chiếu nào được kích hoạt, một hệ tọa độ quy chiếu mới sẽ tự động được tạo mới.
- Đóng cửa sổ Cài đặt hoặc chọn OK.

- Chọn Auto Setup

- Chọn tất cả đường và mặt trên của bản phác thảo và ấn Bước này rất cần thiết vì nó sẽ cung cấp cho RoboDK thông tin cần thiết để tính toán pháp tuyến cho bề mặt và do đó tính toán hướng của dụng cụ đánh bóng trên bề mặt cong.
- Chọn Done
 . Dự án sẽ được tải vào trong RoboDK. Có thể mất một khoảng thời gian, tùy thuộc vào độ phức tạp của mô hình, cài đặt nhập trong RoboDK và khả năng tính toán của máy tính đang làm việc.
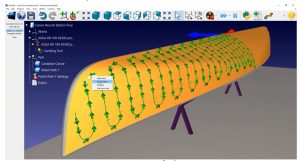
. Dự án sẽ được tải vào trong RoboDK. Có thể mất một khoảng thời gian, tùy thuộc vào độ phức tạp của mô hình, cài đặt nhập trong RoboDK và khả năng tính toán của máy tính đang làm việc. - Chúng ta sẽ thấy part(Canadian Canoe) và path (Polish Path 1) đã được tải vào trong RoboDK trong hệ quy chiếu đang được kích hoạt (Part).
- RoboDK Station:
Bước tiếp theo là xác minh xem thứ tự thực hiện các phần của đường dẫn có đúng không bằng cách chọn ![]() Polish Path 1 Settings ➔ Update ➔ Simulate. Trong ví dụ này, việc điều chỉnh lại thứ tự là cần thiết.
Polish Path 1 Settings ➔ Update ➔ Simulate. Trong ví dụ này, việc điều chỉnh lại thứ tự là cần thiết.
Lưu ý: Đối với dự án phức tạp, như dự án này, bạn nên bỏ chọn tùy chọn “tự động cập nhật (auto update)” vì nó sẽ làm chậm quá trình cài đặt của bạn vì phần mềm phải tính toán lại đường dẫn sau mỗi thay đổi. Bạn có thể cập nhật thủ công bằng nút Update.
Chúng ta có thể nhìn thấy những đường nhỏ màu trắng xuất hiện trên các đường dẫn trên cano. Những đường đó chính là tiêu chuẩn cho bề mặt. Trong ví dụ này, tất cả dường như đã được nhập một cách chính xác.
Chúng ta làm theo những bước sau đây để thiết lập hướng của đường dẫn:
- Chọn Polish Path 1
 Settings
Settings - Nhấn chuột vàoSelect curve.
Bây giờ bạn có thể thấy thứ tự và hướng mà các đoạn đường dẫn được thực thi. Nếu bạn muốn thay đổi hướng, hãy nhấp chuột phải vào nó và chọn Switch sense
Trong trường hợp này, đường dẫn cần được làm lại:
- Nhấp chuột phải vào không gian trống của Station (nền xanh lam)\
- Chọn Reset selection
- Chọn dòng bạn muốn bắt đầu. Đảm bảo rằng nó đang chỉ đúng hướng.
- Chọn Auto select all ở góc trên cùng bên trái của màn hình.
- Chọn Done.
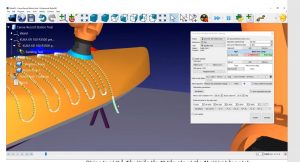
Chúng ta bây giờ đã có thể mô phỏng bằng cách click vào Polish Path 1 ![]() Settings ➔ Update ➔ Simulate.
Settings ➔ Update ➔ Simulate.
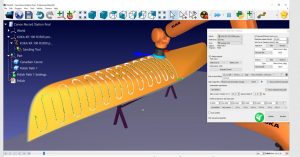
Lưu ý: Theo mặc định, khoảng cách tiếp cận và khoảng rút lại là 100 mm. Điều đó nghĩa là robot sẽ đi xuống và bắt đầu đường đi theo đường dẫn. Nhưng chúng ta cũng có thể sử dụng “Vòng cung” khoảng 20 độ với bán kính 1m bằng cách nhấn đúp vào Polish Path 1![]() Settings ➔ Type. Bằng cách đó, robot sẽ đi theo đường cong này trước khi tham gia vào đường dẫn. Bạn có thể làm tương tự với động tác rút lại.
Settings ➔ Type. Bằng cách đó, robot sẽ đi theo đường cong này trước khi tham gia vào đường dẫn. Bạn có thể làm tương tự với động tác rút lại.
Bạn cũng có thể thêm chuyển động nhanh 200 mm để tránh va chạm giữa robot và ca nô bằng cách nhấp đúp vào Polish Path 1 ![]() Settings ➔ Add.
Settings ➔ Add.
Chúng ta có thể điều khiển tốc độ tiếp cận và tốc độ rút lại bằng cách chọn Polish Path 1 ![]() Settings ➔ Program Events ➔ Fast move speed (mm/s) và nhập 200mm
Settings ➔ Program Events ➔ Fast move speed (mm/s) và nhập 200mm
Trong menu này, chúng ta cũng có thể kích hoạt tùy chọn Set Rounding. Theo mặc định, Mỗi đường trắng dọc theo đường dẫn sẽ là điểm được gửi đến bộ điều khiển robot cũng là các điểm mà robot sẽ dừng lại. Trong chà nhám hoặc đánh bóng, nó sẽ không tối ưu.
Kích hoạt hộp kiểm tra Set Rounding để kích hoạt tùy chọn “di chuyển liên tục” trong bộ điều khiển. Tùy thuộc vào thương hiệu robot, tên của tùy chọn đó có thể là “làm tròn”, “chuyển động liên tục” hoặc “dữ liệu vùng”. Trong ví dụ này, giá trị sẽ là 0,5mm.
- Mẹo: Bạn có thể quản lý các kích hoạt hoạt động đầu ra phụ thuộc vào đường dẫn trong menu sau Polish Path 1 Settings ➔ Program Events (tức là bạn có thể bắt đầu quay dụng cụ đánh bóng trong khi tiếp cận đường dẫn hoặc khi bắt đầu đường dẫn.).
- Mẹo: Bạn có thể chỉnh lại tốc độ đánh bóng bằng cách chỉnh lại tốc độ làm việc. Click đúp vào Polish Path 1 Settings ➔ Operation speed (mm/s).
Để tạo một chương trình rô bốt thực thụ, bạn cần tạo một tệp .src mà bộ điều khiển KRC có thể đọc được.
Làm theo các bước sau để tạo ra một chương trình cho robot:
- Click chuột phải vào
 Polish ➔ Select Post Processor. Trong ví dụ này, chúng ta có thể sử dụng bộ điều khiển KRC4.
Polish ➔ Select Post Processor. Trong ví dụ này, chúng ta có thể sử dụng bộ điều khiển KRC4. - Chọn OK
- Click chuột phải vào Polish ➔ Generate robot program hoặc ấn Một trình soạn thảo văn bản sẽ xuất hiện cùng với tệp SRC mà bạn cần gửi tới rô bốt.
