- Giới thiệu:
Phần này sẽ giới thiệu cách để tạo một dự án (project) cơ bản trong RoboDK để mô phỏng robot và lập trình ngoại tuyến. Trong ví dụ này, chúng ta sẽ mô phỏng và lập trình cho một robot Kawasaki RS007N dùng trong việc phân phối chất lỏng bằng SolidWorks. Bạn sẽ học cách chuyển một bản phác thảo 2D trong SolidWorks thành một chương trình robot thực thụ trong vòng chưa đầy 15 phút.
Với RoboDK Plug-in cho SolidWorks, chúng ta có thể dễ dàng đưa một mô hình 3D được tạo bởi phần mềm SolidWorks vào RoboDK. Plug-in này cho phép chúng ta lập trình cho 50 robot được sản xuất bởi các nhà sản xuất khác nhau và 500 robot trực tiếp trên SolidWorks.
RoboDK Plug-in cho SolidWorks từ bản SolidWorks 2016 trở lên hoàn toàn miễn phí. Tuy nhiên, một số tùy chọn trong RoboDK yêu cầu phải trả phí.
- Ví dụ Robot phân phối chất lỏng:
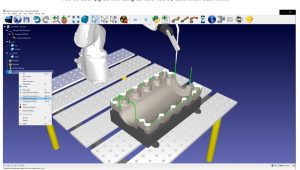
Ví dụ này sử dụng robot Kawasaki RS007N, một đầu điều phối chất lỏng, chi tiết, rãnh chứa chất lỏng, đồ gá.
Mở dự án (Project):
- Chọn File➔
 Open
Open - Tìm ví dụ điều phổi chất lỏng trong phần ví dụ của RoboDK: C:/RoboDK/Examples/Plugin-SolidWorks-Liquid-Dispensing.rdk.
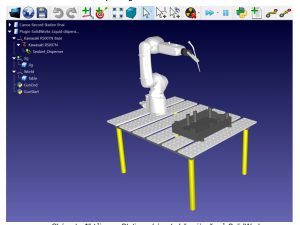
Chúng ta đã tải xong Station, chúng ta bây giờ sẽ mở SolidWorks.
- Tạo bản vẽ phác thảo 2D trong SolidWorks:
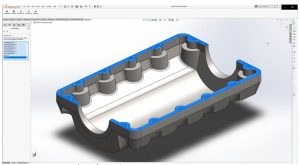
Mở vật thể 3D trong SolidWorks. Trong ví dụ này, đối tượng là một hộp chứa dầu có rãnh chứa chất lỏng trên mặt bích-rãnh mà chúng ta phải dùng robot để điền đầy nó.
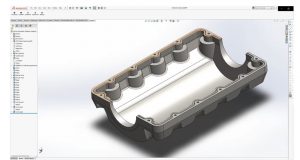
Mục tiêu của dự án này là phân phối chất lỏng bịt kín (Sealent) ở trung tâm của rãnh. Bằng cách này, chất lỏng có thể chảy và điền đầy rãnh dễ dàng.
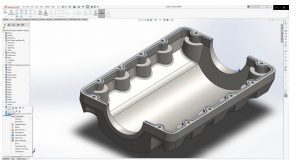
Đây là phần mà bản phác thảo 2D được sử dụng. Bạn phải bắt đầu bằng cách tạo một bản phác thảo mới trên bề mặt phẳng của mặt bích:
- Chọn vào tab Sketch và ấn vào Sketch để tạp một bản phác thảo mới.
- Chọn một trong các cạnh của rãnh
- Click chuột phải và ấn vào mục Select Tangency để tự động chọn toàn bộ cạnh của rãnh.
- Chọn vào mục Offset Entities và nhập ½ bề rộng của rãnh vào (trong ví dụ này, giá trị là 1.5mm).
Làm tương tự với phía bên còn lại của hộp chứa dầu. Hãy chắc chắn rằng bản Sketch đã được ẩn đi như hình dưới để có thể sử dụng được Plug-in của RoboDK.
Bước tiếp theo sẽ là đưa bản phác thảo (Sketch) vào RoboDK:
- Chọn tab RoboDK và chọn
 Settings.
Settings. - Nhập tên vật thể (Object Name) mà bạn muốn vào RoboDK. Trong ví dụ này, tên vật thể sẽ là “Oil Pan”
- Nhập tên hệ quy chiếu (Refernce Name) mà bạn muốn xuất bản phác thảo tới. Ví dụ này tên hệ quy chiếu sẽ là “jig”
- Đóng cửa sổ Cài đặt hoặc chọn vào OK

- Chọn Auto Setup
 trong SolidWorks
trong SolidWorks - Chọn tất cả các đường thẳng trong Sketch và bề mặt trên cùng, sau đó ấn OK
- Chọn Done
 , dự án sẽ được đưa vào RoboDK.
, dự án sẽ được đưa vào RoboDK.
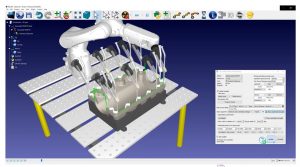
Bạn sẽ thấy chi tiết được tải lên hệ tọa độ đang hoạt động (jig) và một Curve follow project “Tạm dịch dự án theo dõi Đường cong” mới trong RoboDK theo đường chạy của đầu phân phối chất lỏng.
- RoboDK station:
Bước tiếp theo là xác minh xem thứ tự thực hiện các phần đường dẫn có đúng không bằng cách chọn![]() Oil Pan Settings ➔ Update ➔ Simulate . Trong ví dụ này, việc chỉnh lại thứ tự là cần thiết.
Oil Pan Settings ➔ Update ➔ Simulate . Trong ví dụ này, việc chỉnh lại thứ tự là cần thiết.

Nếu bạn muốn thay đổi thứ tự thực hiện đường dẫn thì hãy theo các bước sau:
- Chỉnh lại thứ tự thực hiện đường dẫn công cụ bằng cách click vào
 Oil Pan Settings ➔ Select curves.
Oil Pan Settings ➔ Select curves. - Ấn chuột phải vào khu vực trống (hình nền xanh) và ấn vào Reset Selection
- Đến điểm bắt đầu của đường dẫn và chọn đường dẫn đầu tiên. Hãy chắc chắn mũi tên đã chỉ đúng hướng mình mong muốn, nếu cần điều chỉnh lại hướng của những mũi tên đó, chúng ta có thể ấn chuột phải và chọn Switch sense.
- Chọn vào Auto select next curve hoặc Auto select all để tự động sắp xếp đúng thứ tự.
- Chọn Done . Sau đó, phần mềm sẽ tự động quay lại cửa sổ cài đặt của RoboDK.
Tiếp theo, chúng ta phải chỉnh lại hướng của công cụ (đầu phân phối chất lỏng)
- Chọn Show preferred tool path để hiện hướng của công cụ dọc theo đường dẫn như hình dưới đây.
- Chỉnh giá trị của Trong ví dụ này giá trị sẽ là -90.
- Chọn Update ➔ Simulate.
 Để tạo ra một chương trình chạy robot, click chuột phải vào
Để tạo ra một chương trình chạy robot, click chuột phải vào ![]() Oil ➔ Generate robot program hoặc ấn F6.
Oil ➔ Generate robot program hoặc ấn F6.
File có đuôi .pg đã sẵn sàng để đưa vào bộ điều khiển của robot.