- Robot công nghiệp được chế tạo như thế nào ? Hướng dẫn về các thành phần và chuyển động của cánh tay robot
– Cấu trúc của robot và con người có giống nhau không ?
Con người và robot cơ học, tuy có vẻ đối lập nhưng trên thực tế, chúng có cùng cấu trúc cơ bản của các liên kết (xương) và khớp. Khung cơ bản của robot công nghiệp, trong đó chủ yếu được tạo thành từ các cánh tay robot, là sự kết hợp của các liên kết và khớp nối. Liên quan đến cơ thể người, các bộ phận có thể tự do uốn cong và di chuyển, chẳng hạn như khuỷu tay và vai, là các khớp và xương kết nối các khớp đó tương đương với các liên kết của robot. Nguyên tắc chuyển động các khớp và truyền lực qua các mắt xích phổ biến ở cả người và rrobot.
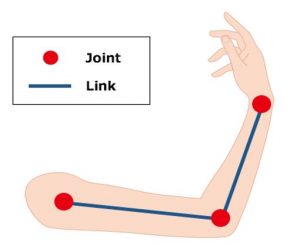
Khủy thay và vài của con người thì được kết nối từ các khớp và xương
Robot được phân loại đại khái thành hai loại theo cách sắp xếp các liên kết của chúng:
1) liên kết nối tiếp.
2) liên kết song song.
Cánh tay của con người được phân loại là một liên kết nối tiếp vì các khớp của nó là vai, cánh tay và cổ tay được xếp theo chuỗi.
| Liên kết nối tiếp | Liên kết song song |
 |
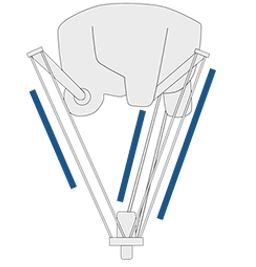 |
Robot công nghiệp được phân thành nhiều loại như loại có khớp theo chiều dọc và loại có khớp theo chiều ngang (Cánh tay Robot tuân thủ chọn lọc-SCARA), tùy thuộc vào chuyển động khớp và cấu trúc.
- So sánh chuyển động của robot và con người
Bây giờ, chúng ta hãy xem xét chuyển động của một loại khớp nối thẳng đứng có cấu trúc cơ học giống như cánh tay người làm ví dụ.
Robot khớp dọc là robot công nghiệp có cấu trúc liên kết nối tiếp. Nó thường bao gồm sáu khớp (6 trục).
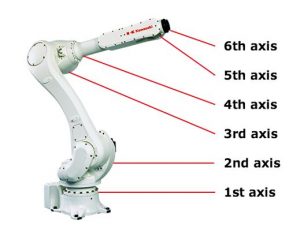
Hình sau cho thấy sự so sánh giữa chuyển động của robot và con người.
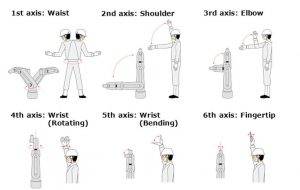
Trục thứ 1 đến thứ 3 là thắt lưng và cánh tay, và trục thứ 4 đến trục thứ 6 là từ cổ tay trở lên đầu ngón tay. Ba trục đầu tiên đưa cổ tay đến một vị trí cụ thể, và ba trục tiếp theo di chuyển cổ tay tự do. Cấu trúc 6 trục này cho phép robot di chuyển tự do như con người có thể.
- Di chuyển các khớp cần nhưng yêu cầu gì ?
Tiếp theo kiểm tra chi tiết cấu trúc bên trong của robot công nghiệp
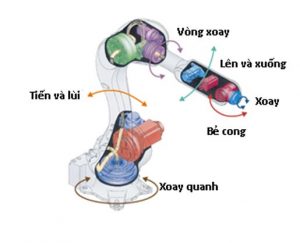
Hình minh họa bên cho thấy cấu trúc của robot đa năng có tải trọng vừa và nhỏ “R series” của Kawasaki Heavy Industries, hoặc Kawasaki. Dòng R này hoạt động trong nhiều lĩnh vực như lắp ráp thiết bị điện tử và hàn hồ quang. Vì dây cáp và dây nịt có thể được lắp bên trong cánh tay, nên có thể tránh được sự can thiệp của thiết bị ngoại vi và robot có thể làm việc trong một không gian nhỏ. Tính năng của nó là hoạt động nhanh chóng có thể tương ứng với các chuyển động linh hoạt.
Trong hình minh họa này, rõ ràng là một robot được tạo thành từ nhiều bộ phận khác nhau. Trong số những bộ phận đó, có bốn bộ phận đặc biệt quan trọng: bộ truyền động, bộ giảm tốc, bộ mã hóa và bộ truyền động, tất cả đều sẽ được giải thích riêng. Trong hình minh họa này, rõ ràng là một robot được tạo thành từ nhiều bộ phận khác nhau.
- Bộ truyền động
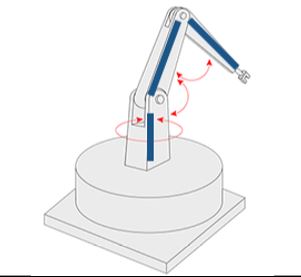
Cơ cấu truyền động là một thành phần có chức năng như khớp của roobot, cho phép roobot di chuyển cánh tay lên xuống hoặc quay, và nó chuyển năng lượng thành chuyển động cơ học. Có thể khó hiểu khái niệm này, nhưng hãy nghĩ về động cơ như một ví dụ. Các điểm được đánh dấu bằng vòng tròn màu đỏ trong hình minh họa dưới đây là vị trí của động cơ R series.
Tuy nhiên, nếu đó là một động cơ đơn giản như những động cơ được sử dụng trong bộ mô hình bằng nhựa, thì không thể thực hiện hoạt động chính xác đòi hỏi các chuyển động chính xác và độ chính xác đến 0,01mm. Do đó, một động cơ có chức năng cao được gọi là động cơ servo, có thể điều khiển vị trí và tốc độ, được sử dụng cho các robot công nghiệp.
Nguồn năng lượng phổ biến nhất để cung cấp năng lượng cho bộ truyền động là điện, nhưng năng lượng thủy lực và khí nén cũng có thể được sử dụng. Một số thiết bị truyền động chạy bằng thủy lực đặc biệt ở chỗ chúng có thể tạo ra công suất lớn và có khả năng chống va đập.
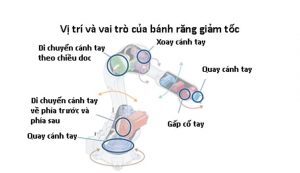
- Hộp giảm tốc
Hộp giảm tốc là một thiết bị để tăng công suất của động cơ. Nếu chỉ có động cơ thì công suất bị hạn chế. Để tạo ra công suất lớn, về cơ bản người ta sử dụng động cơ kết hợp với hộp giảm tốc. Các khu vực được khoanh màu xanh lam trong hình minh họa sau là bánh răng giảm tốc.

Nếu bạn kết hợp các bánh răng với số lượng bánh răng khác nhau và giảm vòng quay của động cơ đi hệ số 10, công suất của động cơ sẽ nhân với 10. Đây là nguyên tắc giống như bộ truyền động của xe đạp. Xe đạp có bánh răng kích thước khác nhau ở bánh trước và bánh sau. Nói chung, hộp số được sử dụng để thay đổi các bánh răng của bánh sau. Khi chọn một số lớn và số vòng quay của bánh xe được giảm thiểu, việc đạp trở nên dễ dàng hơn, thậm chí lên đồi dốc cũng ít khó khăn hơn nhiều. Nói cách khác, công suất đầu ra có thể được tăng lên.

- Mã hóa
Bộ mã hóa là một thiết bị cho biết vị trí (góc) của trục quay của động cơ. Có bộ mã hóa, nó có thể cung cấp dữ liệu hữu hình về hướng và tốc độ di chuyển của robot. Các bộ mã hóa quang thông thường có một đĩa được gắn vào trục quay của động cơ. Đĩa có các khe hở đều nhau để ánh sáng đi qua và hai bên đĩa là đi-ốt phát quang (LED) và các phần tử nhận ánh sáng (điốt quang) để phân biệt cường độ sáng (sáng tối).
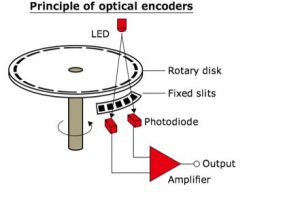
Khi động cơ quay, ánh sáng đi qua các khe hoặc bị chặn, do đó, góc quay và tốc độ có thể được xác định bằng cách đọc các tín hiệu. Điều này cho phép động cơ servo kiểm soát chính xác vị trí và tốc độ.
- Quá trình truyền lực
Bộ truyền động là bộ phận truyền công suất do các bộ truyền động và bánh răng giảm tốc tạo ra. Truyền lực cũng có khả năng thay đổi hướng và độ lớn của công suất. Xét một chiếc xe đạp như một ví dụ trước đây, dây xích nối tay quay với bánh sau là bộ truyền động. Xe đạp được truyền động bằng cách lấy chuyển động quay từ bàn đạp và truyền nó đến bánh sau bằng cách sử dụng hộp số.
Ý tưởng này cũng được áp dụng vào cấu trúc của robot. Một động cơ được sử dụng trong rô bốt thường được đặt gần các khớp, nhưng nó cũng có thể được đặt xa các khớp bằng cách sử dụng các cơ cấu truyền động như dây đai và bánh răng. Ví dụ, trong cổ tay của rô bốt dòng R, vì động cơ có thể được lắp vào phần khuỷu tay của cánh tay bằng cơ chế dẫn truyền, nên một cổ tay nhỏ gọn là khả thi.
- Thêm các chức năng với một công cụ có thể hoán đổi
Con người có thể thực hiện các nhiệm vụ khác nhau bằng các công cụ. Trong trường hợp của rô bốt công nghiệp, việc hoán đổi thiết bị gắn trên cổ tay của chúng làm cho rô bốt có tính linh hoạt cao và cho phép chúng đảm nhận nhiều công việc khác nhau. Thiết bị này được gọi là “thiết bị hiệu ứng cuối” và có rất nhiều thiết bị sẵn sàng để sử dụng bao gồm tay để nâng vật lên, các loại chân không (hút) và các công cụ để hàn và sơn. Robot có thể thực hiện nhiều công việc khác nhau bằng cách kết hợp chuyển động linh hoạt được thực hiện bởi trục của robot và các hiệu ứng cuối theo nhiệm vụ cụ thể.
Bài viết này trình bày chi tiết về cấu trúc cơ bản của rô bốt công nghiệp và thông qua đó, chúng tôi đã tìm hiểu về các thành phần tạo nên cấu trúc, vị trí của chúng và vai trò của chúng. Mọi người có thể nghĩ rằng không cần biết hoặc tìm hiểu về cách một robot được kết hợp với nhau khi xem xét triển khai robot tại nơi làm việc. Tuy nhiên, có một cái nhìn tổng quát sẽ giúp bạn dễ dàng tìm ra những thứ như loại chuyển động và công việc nào có thể thực hiện được bằng cách xem số trục mà robot có hoặc cách robot có thể được sử dụng trong công ty. Đối với các công ty đang xem xét hướng dẫn, thông tin sản phẩm chi tiết về từng robot công nghiệp và các ví dụ ứng dụng có sẵn trên trang web của Kawasaki’s Robot Division.

Cho e hỏi động cơ để cánh tay hoạt động nó là động cơ gì vậy ạ.. bởi e đọc xog thấy mỗi khúc đều có 2-3 động cơ để nó hoạt động linh hoạt
Động cơ servo nha bạn
Cho em hỏi về cơ chế hoạt động của robot nói chung ạ