Quét 3D là quá trình phân tích một đối tượng hoặc môi trường trong thế giới thực để thu thập dữ liệu về hình dạng của nó và có thể là hình dạng của nó (ví dụ như màu sắc). Dữ liệu được thu thập sau đó có thể được sử dụng để xây dựng các mô hình 3D kỹ thuật số .
Một máy quét 3D có thể dựa trên nhiều công nghệ khác nhau, mỗi công nghệ có những hạn chế, ưu điểm và chi phí riêng. Nhiều hạn chế trong các loại đối tượng có thể được số hóa vẫn còn tồn tại. ví dụ, công nghệ quang học có thể gặp nhiều khó khăn với các vật thể sáng bóng, phản chiếu hoặc trong suốt. Ví dụ, quét chụp cắt lớp điện toán công nghiệp và máy quét 3D có cấu trúc ánh sáng có thể được sử dụng để xây dựng các mô hình 3D kỹ thuật số mà không cần thử nghiệm phá hủy .
Dữ liệu 3D được thu thập hữu ích cho nhiều ứng dụng. Những thiết bị này được sử dụng rộng rãi bởi ngành công nghiệp giải trí trong sản xuất phim và trò chơi video, bao gồm cả thực tế ảo . Các ứng dụng phổ biến khác của công nghệ này bao gồm thực tế tăng cường , [1] chụp chuyển động , [2] [3] nhận dạng cử chỉ , [4] lập bản đồ robot , [5] thiết kế công nghiệp , chỉnh hình và chân tay giả , [6] kỹ thuật đảo ngược và tạo mẫu , chất lượng kiểm soát / kiểm tra và số hóa của các hiện vật văn hóa. [7]
Nội dung
1 chức năng
2 Công nghệ
2.1 Liên hệ
2.2 Không tiếp xúc hoạt động
2.2.1 Thời gian bay
2.2.2 Tam giác
2.2.3 Điểm mạnh và điểm yếu
2.2.4 Hình ba chiều
2.3 Máy quét laser cầm tay
2.4 Ánh sáng cấu trúc
2.5 Ánh sáng điều biến
2.6 Kỹ thuật thể tích
2.6.1 Y tế
2.6.2 Công nghiệp
2.7 Không thụ động
2.7.1 Hỗ trợ người dùng (mô hình hóa dựa trên hình ảnh)
3 Tái thiết
3.1 Từ các đám mây điểm
3.2 Từ các mô hình
3.3 Từ một tập hợp các lát 2D
3.4 Từ quét laser
4 ứng dụng
4.1 Công nghiệp xây dựng và kỹ thuật dân dụng
4.2 Quy trình thiết kế
4.3 Giải trí
4.4 Chụp ảnh 3D
4.5 Thực thi pháp luật
4.6 Kỹ thuật đảo ngược
4.7 Bất động sản
4.8 Du lịch ảo / từ xa
4.9 Di sản văn hóa
4.9.1 Michelangelo
4.9.2 Monticello
4.9.3 viên Cuneiform
4.9.4 Lăng mộ Kasubi
4.9.5 “Mô hình của Rome cổ đại”
4.9.6 Các dự án khác
4.10 Medical CAD/CAM
4.11 Đảm bảo chất lượng và đo lường công nghiệp
4.12 Lưu hành chi phí vận chuyển và thuế xuất nhập khẩu quốc tế
5 Xem thêm
6 tài liệu tham khảo
Chức năng



Quét 3D bộ xương cá voi vây trong Bảo tàng Lịch sử Tự nhiên của Slovenia (tháng 8 năm 2013)
Mục đích của máy quét 3D thường là tạo ra một mô hình 3D . Mô hình 3D này bao gồm một đám mây điểm của các mẫu hình học trên bề mặt của đối tượng. Những điểm này sau đó có thể được sử dụng để ngoại suy hình dạng của đối tượng (một quá trình được gọi là tái thiết ). Nếu thông tin màu được thu thập tại mỗi điểm, thì màu sắc trên bề mặt của đối tượng cũng có thể được xác định.
Máy quét 3D chia sẻ một số đặc điểm với máy ảnh. Giống như hầu hết các máy ảnh, chúng có trường nhìn giống hình nón và giống như máy ảnh, chúng chỉ có thể thu thập thông tin về các bề mặt không bị che khuất. Mặc dù máy ảnh thu thập thông tin màu về các bề mặt trong trường nhìn của nó , máy quét 3D thu thập thông tin khoảng cách về các bề mặt trong trường nhìn của nó. “Hình ảnh” được tạo bởi máy quét 3D mô tả khoảng cách đến một bề mặt tại mỗi điểm trong ảnh. Điều này cho phép xác định vị trí ba chiều của từng điểm trong ảnh.
Trong hầu hết các tình huống, một lần quét sẽ không tạo ra một mô hình hoàn chỉnh của đối tượng. Nhiều lần quét, thậm chí hàng trăm, từ nhiều hướng khác nhau thường được yêu cầu để có được thông tin về tất cả các khía cạnh của chủ đề. Các bản quét này phải được đưa vào một hệ thống tham chiếu chung , một quy trình thường được gọi là căn chỉnh hoặc đăng ký , sau đó được hợp nhất để tạo ra một mô hình 3D hoàn chỉnh. Toàn bộ quá trình này, đi từ bản đồ phạm vi đơn đến toàn bộ mô hình, thường được gọi là đường ống quét 3D. [số 8]
Công nghệ
Có nhiều công nghệ để thu được hình dạng của vật thể 3D. Một phân loại được thiết lập tốt [9] chia chúng thành hai loại: tiếp xúc và không tiếp xúc. Các giải pháp không tiếp xúc có thể được chia thành hai loại chính, chủ động và thụ động. Có một loạt các công nghệ thuộc từng loại này.
Tiếp xúc
Một máy đo tọa độ với cánh tay vuông góc cứng vững.
Máy quét 3D tiếp xúc thăm dò đối tượng thông qua cảm ứng vật lý, trong khi đối tượng tiếp xúc hoặc nằm trên một tấm bề mặt phẳng chính xác , tiếp đất và đánh bóng đến độ nhám bề mặt tối đa cụ thể. Trong trường hợp đối tượng được quét không bằng phẳng hoặc không thể nằm ổn định trên một bề mặt phẳng, nó được hỗ trợ và giữ chắc chắn tại chỗ bằng một vật cố định .
Cơ chế quét có thể có ba dạng khác nhau:
Một hệ thống xe ngựa với cánh tay cứng nhắc giữ chặt trong mối quan hệ vuông góc và mỗi trục lướt dọc theo một đường ray. Các hệ thống như vậy hoạt động tốt nhất với hình dạng hồ sơ phẳng hoặc bề mặt cong lồi đơn giản.
Một cánh tay khớp nối với xương cứng và cảm biến góc chính xác cao. Vị trí của đầu cánh tay liên quan đến toán học phức tạp tính toán góc xoay cổ tay và góc bản lề của mỗi khớp. Điều này là lý tưởng để thăm dò vào các kẽ hở và không gian bên trong với một cái miệng nhỏ.
Một sự kết hợp của cả hai phương pháp có thể được sử dụng, chẳng hạn như một cánh tay khớp nối được treo trên một cỗ xe du lịch, để ánh xạ các vật thể lớn với các hốc bên trong hoặc các bề mặt chồng chéo.
Một CMM ( phối hợp máy đo ) là một ví dụ của một máy quét tiếp xúc 3D. Nó được sử dụng chủ yếu trong sản xuất và có thể rất chính xác. Tuy nhiên, nhược điểm của CMM là nó yêu cầu tiếp xúc với đối tượng được quét. Do đó, hành động quét đối tượng có thể sửa đổi hoặc làm hỏng nó. Thực tế này rất có ý nghĩa khi quét các vật thể tinh tế hoặc có giá trị như các cổ vật lịch sử. Nhược điểm khác của CMM là chúng tương đối chậm so với các phương pháp quét khác. Vật lý di chuyển cánh tay mà đầu dò được gắn vào có thể rất chậm và các CMM nhanh nhất chỉ có thể hoạt động trên vài trăm hertz. Ngược lại, một hệ thống quang học như máy quét laser có thể hoạt động từ 10 đến 500 kHz. [10]
Các ví dụ khác là các đầu dò cảm ứng điều khiển bằng tay được sử dụng để số hóa các mô hình đất sét trong ngành công nghiệp hoạt hình máy tính.
Hoạt động không tiếp xúc
Máy quét hoạt động phát ra một số loại bức xạ hoặc ánh sáng và phát hiện sự phản xạ hoặc bức xạ của nó đi qua vật thể để thăm dò một vật thể hoặc môi trường. Các loại khí thải có thể được sử dụng bao gồm ánh sáng, siêu âm hoặc x-quang.
Thời gian phản hồi
Máy quét nắp này có thể được sử dụng để quét các tòa nhà, thành đá, v.v., để tạo ra mô hình 3D. Các hòn đảo có thể nhắm chùm tia laser của nó trong một phạm vi rộng: đầu của nó xoay theo chiều ngang, một chiếc gương lật theo chiều dọc. Chùm tia laser được sử dụng để đo khoảng cách đến vật thể đầu tiên trên đường đi của nó.
Máy quét laser 3D thời gian phản hồi là một máy quét hoạt động sử dụng ánh sáng laser để thăm dò đối tượng. Trung tâm của loại máy quét này là công cụ tìm phạm vi laser thời gian bay. Công cụ tìm phạm vi laser tìm thấy khoảng cách của một bề mặt bằng cách xác định thời gian khứ hồi của một xung ánh sáng. Một tia laser được sử dụng để phát ra xung ánh sáng và lượng thời gian trước khi ánh sáng phản xạ được nhìn thấy bằng máy dò được đo. Vì tốc độ ánh sáng {\ displaystyle c}cđược biết, thời gian khứ hồi xác định khoảng cách di chuyển của ánh sáng, gấp đôi khoảng cách giữa máy quét và bề mặt. Nếu như{\ displaystyle t}t là thời gian khứ hồi, sau đó khoảng cách bằng {\ displaystyle \ textstyle c \! \ cdot \! t / 2}\ textstyle c \! \ cdot \! t / 2. Độ chính xác của máy quét laser 3D thời gian bay phụ thuộc vào cách chúng ta có thể đo chính xác{\ displaystyle t}tthời gian: 3,3 picos giây (xấp xỉ) là thời gian để ánh sáng truyền đi 1 milimet.
Công cụ tìm phạm vi laser chỉ phát hiện khoảng cách của một điểm theo hướng nhìn của nó. Do đó, máy quét sẽ quét toàn bộ trường nhìn của nó tại một thời điểm bằng cách thay đổi hướng quan sát của trình tìm phạm vi để quét các điểm khác nhau. Hướng nhìn của công cụ tìm phạm vi laser có thể được thay đổi bằng cách xoay chính công cụ tìm phạm vi hoặc bằng cách sử dụng hệ thống gương xoay. Phương pháp thứ hai thường được sử dụng vì gương nhẹ hơn nhiều và do đó có thể được quay nhanh hơn nhiều và với độ chính xác cao hơn. Máy quét laser 3D thời gian bay thông thường có thể đo khoảng cách 10.000 ~ 100.000 điểm mỗi giây.
Thiết bị thời gian phản hồi cũng có sẵn trong cấu hình 2D. Điều này được gọi là một máy ảnh thời gian . [11]
Tam giác
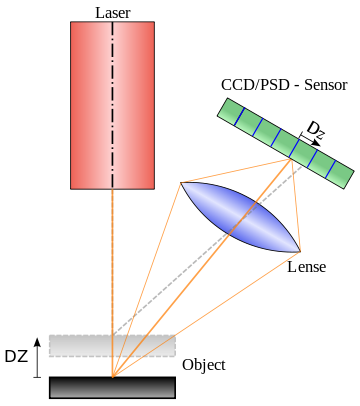
Nguyên lý của một cảm biến tam giác laser. Hai vị trí đối tượng được hiển thị.
Tam giácmáy quét laser 3D dựa trên cũng là máy quét hoạt động sử dụng ánh sáng laser để thăm dò môi trường. Đối với máy quét laser 3D thời gian bay, tia laser tam giác chiếu tia laser vào đối tượng và khai thác máy ảnh để tìm vị trí của chấm laser. Tùy thuộc vào khoảng cách của tia laser chiếu vào bề mặt, điểm laser xuất hiện ở những vị trí khác nhau trong trường nhìn của máy ảnh. Kỹ thuật này được gọi là tam giác vì các chấm laser, máy ảnh và bộ phát laser tạo thành một hình tam giác. Độ dài của một cạnh của tam giác, khoảng cách giữa máy ảnh và bộ phát laser được biết đến. Góc của góc phát laser cũng được biết đến. Góc của góc camera có thể được xác định bằng cách nhìn vào vị trí của chấm laser trong trường nhìn của camera.[12] Trong hầu hết các trường hợp, một dải laser, thay vì một chấm laser đơn lẻ, được quét ngang qua vật thể để tăng tốc quá trình thu nhận. Các Hội đồng Nghiên cứu Quốc gia Canada là một trong những học viện đầu tiên để phát triển tam giác dựa trên công nghệ quét laser trong năm 1978. [13]
Điểm mạnh và điểm yếu
Mỗi công cụ tìm phạm vi thời gian phản hồi và tam giác đều có điểm mạnh và điểm yếu khiến chúng phù hợp với các tình huống khác nhau. Ưu điểm của công cụ tìm phạm vi thời gian phản hồi là chúng có khả năng hoạt động trên một khoảng cách rất dài, theo thứ tự hàng km. Do đó, các máy quét này phù hợp để quét các cấu trúc lớn như các tòa nhà hoặc các đặc điểm địa lý. Nhược điểm của công cụ tìm phạm vi thời gian bay là độ chính xác của chúng. Do tốc độ ánh sáng cao, thời gian của chuyến đi khứ hồi rất khó khăn và độ chính xác của phép đo khoảng cách là tương đối thấp, theo thứ tự milimet.
Công cụ tìm phạm vi tam giác hoàn toàn ngược lại. Chúng có phạm vi giới hạn vài mét, nhưng độ chính xác của chúng tương đối cao. Độ chính xác của các công cụ tìm phạm vi tam giác là trên hàng chục micromet .
Độ chính xác của máy quét thời gian có thể bị mất khi tia laser chạm vào rìa của vật thể vì thông tin được gửi trở lại máy quét là từ hai vị trí khác nhau cho một xung laser. Tọa độ liên quan đến vị trí của máy quét cho một điểm chạm vào cạnh của vật thể sẽ được tính dựa trên mức trung bình và do đó sẽ đặt điểm đó ở sai vị trí. Khi sử dụng quét độ phân giải cao trên một đối tượng, khả năng chùm tia chạm vào một cạnh sẽ tăng lên và dữ liệu kết quả sẽ hiển thị nhiễu ngay sau các cạnh của đối tượng. Máy quét có chiều rộng chùm tia nhỏ hơn sẽ giúp giải quyết vấn đề này nhưng sẽ bị giới hạn bởi phạm vi vì chiều rộng chùm tia sẽ tăng theo khoảng cách. Phần mềm cũng có thể giúp đỡ bằng cách xác định rằng vật thể đầu tiên bị tia laser chiếu vào sẽ hủy bỏ thứ hai.
Với tốc độ 10.000 điểm mẫu mỗi giây, quét độ phân giải thấp có thể mất ít hơn một giây, nhưng quét độ phân giải cao, yêu cầu hàng triệu mẫu, có thể mất vài phút cho một số máy quét thời gian bay. Vấn đề này tạo ra là sự biến dạng từ chuyển động. Vì mỗi điểm được lấy mẫu tại một thời điểm khác nhau, bất kỳ chuyển động nào trong đối tượng hoặc máy quét sẽ làm biến dạng dữ liệu được thu thập. Vì vậy, thường là cần thiết để gắn cả đối tượng và máy quét trên nền tảng ổn định và giảm thiểu rung động. Sử dụng các máy quét này để quét các đối tượng chuyển động là rất khó khăn.
Gần đây, đã có nghiên cứu về việc bù cho sự biến dạng từ một lượng nhỏ rung động [14] và biến dạng do chuyển động và / hoặc xoay. [15]
Khi quét ở một vị trí trong bất kỳ khoảng thời gian nào, chuyển động nhẹ có thể xảy ra ở vị trí máy quét do thay đổi nhiệt độ. Nếu máy quét được đặt trên giá ba chân và có ánh sáng mặt trời mạnh ở một bên của máy quét thì bên đó của chân máy sẽ mở rộng và từ từ làm biến dạng dữ liệu quét từ bên này sang bên khác. Một số máy quét laser có bộ bù mức được tích hợp trong chúng để chống lại mọi chuyển động của máy quét trong quá trình quét.
Hình ba chiều conoscopic
Trong một hệ thống hình nón , một chùm tia laser được chiếu lên bề mặt và sau đó sự phản xạ tức thời dọc theo cùng một đường tia được đưa qua một tinh thể hình nón và chiếu lên một bộ cảm biến. Kết quả là một mẫu nhiễu xạ , có thể được phân tích tần số để xác định khoảng cách đến bề mặt đo. Ưu điểm chính với hình ba chiều bằng hình ảnh là chỉ cần một đường tia duy nhất để đo, do đó tạo cơ hội để đo ví dụ độ sâu của lỗ khoan mịn. [16]
Máy quét laser cầm tay
Máy quét laser cầm tay tạo ra hình ảnh 3D thông qua cơ chế tam giác được mô tả ở trên: một chấm hoặc vạch laser được chiếu lên một vật thể từ thiết bị cầm tay và cảm biến (thường là thiết bị ghép điện tích hoặc thiết bị nhạy cảm vị trí ) đo khoảng cách Lên bề mặt. Dữ liệu được thu thập liên quan đến một hệ tọa độ bên trong và do đó để thu thập dữ liệu trong đó máy quét đang chuyển động, phải xác định vị trí của máy quét. Vị trí có thể được xác định bởi máy quét sử dụng các tính năng tham chiếu trên bề mặt được quét (thường là các tab phản chiếu dính, nhưng các tính năng tự nhiên cũng đã được sử dụng trong nghiên cứu) [17] [18] hoặc bằng phương pháp theo dõi bên ngoài. Theo dõi bên ngoài thường có dạngmáy theo dõi laser (để cung cấp vị trí cảm biến) với camera tích hợp (để xác định hướng của máy quét) hoặc giải pháp quang điện ảnh sử dụng 3 camera trở lên cung cấp sáu bậc tự do của máy quét. Cả hai kỹ thuật đều có xu hướng sử dụng các điốt phát sáng màu đỏ được gắn vào máy quét mà máy ảnh nhìn thấy thông qua các bộ lọc cung cấp khả năng phục hồi cho ánh sáng xung quanh. [19]
Dữ liệu được thu thập bởi máy tính và được ghi lại dưới dạng các điểm dữ liệu trong không gian ba chiều , với việc xử lý này có thể được chuyển đổi thành lưới tam giác và sau đó là mô hình thiết kế có sự trợ giúp của máy tính , thường là các bề mặt B-spline hợp lý không đồng nhất . Máy quét laser cầm tay có thể kết hợp dữ liệu này với các cảm biến ánh sáng thụ động, có thể nhìn thấy – thu được kết cấu bề mặt và màu sắc – để xây dựng (hoặc ” kỹ sư đảo ngược “) một mô hình 3D đầy đủ.
Ánh sáng có cấu trúc
Bài chi tiết: Máy quét 3D có cấu trúc ánh sáng
Máy quét 3D có cấu trúc ánh sáng chiếu một mô hình ánh sáng vào đối tượng và xem xét sự biến dạng của mô hình trên đối tượng. Mẫu được chiếu lên đối tượng bằng máy chiếu LCD hoặc nguồn sáng ổn định khác. Một máy ảnh, hơi lệch khỏi máy chiếu mẫu, nhìn vào hình dạng của mẫu và tính toán khoảng cách của mọi điểm trong trường nhìn.
Quét ánh sáng có cấu trúc vẫn là một lĩnh vực nghiên cứu rất tích cực với nhiều tài liệu nghiên cứu được công bố mỗi năm. Các bản đồ hoàn hảo cũng đã được chứng minh là hữu ích vì các mẫu ánh sáng có cấu trúc giải quyết vấn đề tương ứng và cho phép phát hiện lỗi và sửa lỗi. [24] [Xem Morano, R., et al. “Ánh sáng có cấu trúc sử dụng mã giả ngẫu nhiên”, Giao dịch của IEEE về phân tích mẫu và trí thông minh máy .
Ưu điểm của máy quét 3D có cấu trúc ánh sáng là tốc độ và độ chính xác. Thay vì quét từng điểm một, máy quét ánh sáng có cấu trúc quét nhiều điểm hoặc toàn bộ trường nhìn cùng một lúc. Quét toàn bộ trường nhìn trong một phần của giây sẽ làm giảm hoặc loại bỏ vấn đề biến dạng khỏi chuyển động. Một số hệ thống hiện có khả năng quét các đối tượng chuyển động trong thời gian thực. VisionMaster tạo ra một hệ thống quét 3D với camera 5 megapixel – 5 triệu điểm dữ liệu được thu thập trong mỗi khung hình.
Một máy quét thời gian thực sử dụng kỹ thuật chiếu rìa kỹ thuật số và dịch pha (một số phương pháp ánh sáng có cấu trúc nhất định) đã được phát triển, để chụp, tái tạo và hiển thị các chi tiết mật độ cao của các vật thể biến dạng động (như biểu cảm khuôn mặt) ở 40 khung hình trên mỗi khung hình thứ hai. [20] Gần đây, một máy quét khác đã được phát triển. Các mẫu khác nhau có thể được áp dụng cho hệ thống này và tốc độ khung hình để chụp và xử lý dữ liệu đạt được 120 khung hình mỗi giây. Nó cũng có thể quét các bề mặt bị cô lập, ví dụ hai bàn tay di chuyển. [21] Bằng cách sử dụng kỹ thuật làm mờ nhị phân, các bước đột phá tốc độ đã được thực hiện có thể đạt tới hàng trăm [22] đến hàng nghìn khung hình mỗi giây. [23]
Ánh sáng điều chế
Máy quét 3D ánh sáng được điều chế chiếu ánh sáng thay đổi liên tục vào đối tượng. Thông thường nguồn sáng chỉ đơn giản là quay vòng biên độ của nó theo mô hình hình sin . Một camera phát hiện ánh sáng phản xạ và lượng mẫu được dịch chuyển bằng cách xác định khoảng cách ánh sáng đi được. Ánh sáng điều biến cũng cho phép máy quét bỏ qua ánh sáng từ các nguồn khác ngoài laser, do đó không có nhiễu.
Kỹ thuật thể tích
Y khoa
Chụp cắt lớp vi tính (CT) là một phương pháp hình ảnh y tế tạo ra hình ảnh ba chiều của bên trong vật thể từ một loạt hình ảnh X quang hai chiều lớn, tương tự hình ảnh cộng hưởng từ là một kỹ thuật hình ảnh y tế khác cung cấp độ tương phản lớn hơn nhiều giữa các mô mềm khác nhau của cơ thể so với chụp cắt lớp vi tính (CT), làm cho nó đặc biệt hữu ích trong chẩn đoán thần kinh (não), cơ xương khớp, tim mạch và ung thư (ung thư). Những kỹ thuật này tạo ra một biểu diễn thể tích 3D riêng biệt có thể được trực quan hóa , thao tác hoặc chuyển đổi sang bề mặt 3D truyền thống bằng các thuật toán trích xuất isosurface .
Công nghiệp
Mặc dù phổ biến nhất trong y học, Chụp cắt lớp điện toán công nghiệp , Microtomography và MRI cũng được sử dụng trong các lĩnh vực khác để có được một đại diện kỹ thuật số của một vật thể và bên trong nó, như thử nghiệm vật liệu không phá hủy, kỹ thuật đảo ngược , hoặc nghiên cứu các mẫu vật sinh học và cổ sinh vật học.
Không thụ động
Các giải pháp hình ảnh 3D thụ động không tự phát ra bất kỳ loại bức xạ nào, mà thay vào đó dựa vào việc phát hiện bức xạ xung quanh phản xạ. Hầu hết các giải pháp loại này phát hiện ánh sáng khả kiến vì đây là bức xạ xung quanh có sẵn. Các loại bức xạ khác, chẳng hạn như hồng ngoại cũng có thể được sử dụng. Phương pháp thụ động có thể rất rẻ, vì trong hầu hết các trường hợp, chúng không cần phần cứng cụ thể mà là máy ảnh kỹ thuật số đơn giản.
Các hệ thống lập thể thường sử dụng hai máy quay video, cách nhau một chút, nhìn vào cùng một cảnh. Bằng cách phân tích sự khác biệt nhỏ giữa các hình ảnh mà mỗi camera nhìn thấy, có thể xác định khoảng cách tại mỗi điểm trong ảnh. Phương pháp này dựa trên cùng các nguyên tắc thúc đẩy tầm nhìn lập thể của con người [1] .
Hệ thống trắc quang thường sử dụng một camera, nhưng chụp nhiều ảnh trong các điều kiện ánh sáng khác nhau. Những kỹ thuật này cố gắng đảo ngược mô hình hình ảnh để phục hồi hướng bề mặt ở mỗi pixel.
Kỹ thuật Silhouette sử dụng các phác thảo được tạo ra từ một chuỗi các bức ảnh xung quanh một vật thể ba chiều trên nền tương phản tốt. Các bóng này được ép đùn và giao nhau để tạo thành xấp xỉ thân tàu trực quan của vật thể. Với những cách tiếp cận này, một số điểm chung của một vật thể (như bên trong một cái bát) không thể được phát hiện.
Người dùng hỗ trợ (mô hình hóa dựa trên hình ảnh)
Có các phương pháp khác, dựa trên việc người dùng hỗ trợ phát hiện và xác định một số tính năng và hình dạng trên một tập hợp các hình ảnh khác nhau của một đối tượng có thể tự xây dựng một xấp xỉ của đối tượng. Loại kỹ thuật này rất hữu ích để xây dựng xấp xỉ nhanh các vật thể có hình dạng đơn giản như các tòa nhà. Các gói thương mại khác nhau có sẵn như D-Sculptor , iModeller , Autodesk ImageModeler , 123DCatch hoặc PhotoModeler .
Loại giải pháp hình ảnh 3D này dựa trên các nguyên tắc của quang ảnh . Phương pháp này cũng hơi giống với phương pháp chụp ảnh toàn cảnh , ngoại trừ việc các bức ảnh được chụp một đối tượng trên không gian ba chiều để sao chép nó thay vì chụp một loạt ảnh từ một điểm trong không gian ba chiều để Nhân rộng môi trường xung quanh.
Tái thiết
Các đám mây điểm được tạo bởi máy quét 3D và hình ảnh 3D có thể được sử dụng trực tiếp để đo lường và trực quan hóa trong thế giới kiến trúc và xây dựng.
Từ các mô hình
Tuy nhiên, hầu hết các ứng dụng sử dụng mô hình 3D đa giác, mô hình bề mặt NURBS hoặc mô hình CAD dựa trên tính năng có thể chỉnh sửa (còn gọi là mô hình Solid ).
Các mô hình lưới đa giác : Trong một biểu diễn đa giác của một hình dạng, một bề mặt cong được mô hình hóa như nhiều bề mặt phẳng nhỏ (nghĩ về một hình cầu được mô phỏng như một quả bóng sàn nhảy). Các mô hình đa giác, còn được gọi là các mô hình lưới, rất hữu ích cho trực quan hóa, đối với một số CAM (nghĩa là gia công), nhưng nói chung là “nặng” (nghĩa là các tập dữ liệu rất lớn) và tương đối không thể chỉnh sửa trong dạng này. Tái thiết cho mô hình đa giác liên quan đến việc tìm và kết nối các điểm liền kề với các đường thẳng để tạo ra một bề mặt liên tục. Nhiều ứng dụng, cả miễn phí và không miễn phí, đều có sẵn cho mục đích này (ví dụ: GigaMesh , MeshLab , PointCab, kubit PointCloud cho AutoCAD, Reconstructor , fantemodel, PolyWorks, Rapidform, Geomagic, Phần mềm hình ảnh, Rhino 3D, v.v.).
Mô hình bề mặt : Mức độ tinh vi tiếp theo trong mô hình hóa bao gồm sử dụng một miếng vá các bề mặt cong để mô hình hóa hình dạng. Đây có thể là NURBS, TSplines hoặc các biểu diễn cong khác của cấu trúc liên kết cong. Sử dụng NURBS, hình dạng hình cầu trở thành một hình cầu toán học thực sự. Một số ứng dụng cung cấp bố cục vá bằng tay nhưng tốt nhất trong lớp cung cấp cả bố cục vá tự động và bố trí thủ công. Những miếng vá này có ưu điểm là nhẹ hơn và dễ thao tác hơn khi xuất sang CAD. Các mô hình bề mặt có phần có thể chỉnh sửa, nhưng chỉ trong một ý nghĩa điêu khắc của đẩy và kéo để làm biến dạng bề mặt. Đại diện này cho vay chính nó để mô hình hóa các hình dạng hữu cơ và nghệ thuật. Các nhà cung cấp bộ điều biến bề mặt bao gồm Rapidform, Geomagic , Rhino 3D, Maya, T Splines, v.v.
Các mô hình CAD rắn : Từ góc độ kỹ thuật / sản xuất, đại diện cuối cùng của hình dạng số hóa là mô hình CAD tham số, có thể chỉnh sửa. Trong CAD, hình cầu được mô tả bởi các tính năng tham số dễ dàng được chỉnh sửa bằng cách thay đổi một giá trị (ví dụ: điểm trung tâm và bán kính).
Các mô hình CAD này mô tả không chỉ đơn giản là đường bao hoặc hình dạng của đối tượng, mà các mô hình CAD cũng thể hiện “ý đồ thiết kế” (nghĩa là các tính năng quan trọng và mối quan hệ của chúng với các tính năng khác). Một ví dụ về ý định thiết kế không rõ ràng trong hình dạng một mình có thể là bu lông chốt của trống phanh, phải đồng tâm với lỗ ở giữa trống. Kiến thức này sẽ thúc đẩy trình tự và phương pháp tạo mô hình CAD; một nhà thiết kế có nhận thức về mối quan hệ này sẽ không thiết kế các bu lông lug được tham chiếu đến đường kính bên ngoài, mà thay vào đó, đến trung tâm. Một người lập mô hình tạo ra một mô hình CAD sẽ muốn bao gồm cả Hình dạng và ý định thiết kế trong mô hình CAD hoàn chỉnh.
Các nhà cung cấp cung cấp các cách tiếp cận khác nhau để có được mô hình CAD tham số. Một số xuất các bề mặt NURBS và để lại cho nhà thiết kế CAD để hoàn thành mô hình bằng CAD (ví dụ: Geomagic , Imageware, Rhino 3D ). Những người khác sử dụng dữ liệu quét để tạo ra một mô hình dựa trên tính năng có thể chỉnh sửa và có thể kiểm chứng được nhập vào CAD với toàn bộ cây tính năng, mang lại một mô hình CAD nguyên bản, hoàn chỉnh, nắm bắt cả hình dạng và ý định thiết kế (ví dụ Geomagic , Rapidform). Chẳng hạn, thị trường cung cấp nhiều trình cắm khác nhau cho các chương trình CAD đã được thiết lập, chẳng hạn như SolidWorks. Xtract3D, DezignWorks và Geomagic cho SolidWorks cho phép thao tác quét 3D trực tiếp bên trong SolidWorks. Tuy nhiên, các ứng dụng CAD khác đủ mạnh để thao tác các điểm hoặc mô hình đa giác bị giới hạn trong môi trường CAD (ví dụ: CATIA , AutoCAD , Revit ).
Từ một tập hợp các lát 2D
Tái tạo 3D của não và nhãn cầu từ hình ảnh DICOM quét CT. Trong hình ảnh này, các khu vực có mật độ xương hoặc không khí được làm trong suốt và các lát xếp chồng lên nhau trong một căn chỉnh không gian trống gần đúng. Vòng ngoài của vật liệu xung quanh não là các mô mềm của da và cơ ở bên ngoài hộp sọ. Một hộp đen bao quanh các lát để cung cấp nền đen. Vì đây chỉ là những hình ảnh 2D được xếp chồng lên nhau, khi nhìn vào cạnh, các lát cắt biến mất vì chúng có độ dày bằng không. Mỗi lần quét DICOM đại diện cho khoảng 5 mm vật liệu trung bình thành một lát mỏng.
Máy quét CT , CT công nghiệp , MRI hoặc Micro-CT không tạo ra các đám mây điểm mà là một tập hợp các lát 2D (mỗi lát được gọi là “tomogram”) sau đó được xếp chồng lên nhau để tạo ra hình đại diện 3D. Có một số cách để làm điều này tùy thuộc vào đầu ra cần thiết:
Kết xuất khối : Các phần khác nhau của một đối tượng thường có các giá trị ngưỡng hoặc mật độ thang khác nhau. Từ đó, một mô hình 3 chiều có thể được xây dựng và hiển thị trên màn hình. Nhiều mô hình có thể được xây dựng từ các ngưỡng khác nhau, cho phép các màu khác nhau đại diện cho từng thành phần của đối tượng. Kết xuất khối thường chỉ được sử dụng để trực quan hóa đối tượng được quét.
Phân đoạn hình ảnh : Khi các cấu trúc khác nhau có các giá trị ngưỡng / thang độ xám tương tự nhau, có thể tách chúng ra một cách đơn giản bằng cách điều chỉnh các tham số kết xuất khối lượng. Giải pháp được gọi là phân đoạn, một thủ tục thủ công hoặc tự động có thể loại bỏ các cấu trúc không mong muốn khỏi hình ảnh. Phần mềm phân đoạn hình ảnh thường cho phép xuất các cấu trúc được phân đoạn ở định dạng CAD hoặc STL để thao tác thêm.
Chia lưới dựa trên hình ảnh : Khi sử dụng dữ liệu hình ảnh 3D để phân tích tính toán (ví dụ CFD và FEA), chỉ cần phân đoạn dữ liệu và chia lưới từ CAD có thể trở nên tốn thời gian và hầu như không thể điều chỉnh được đối với các cấu trúc liên kết phức tạp điển hình của dữ liệu hình ảnh. Giải pháp này được gọi là chia lưới dựa trên hình ảnh, một quá trình tự động tạo ra một mô tả hình học chính xác và thực tế của dữ liệu quét.
Từ quét laser
Quét laser mô tả phương pháp chung để lấy mẫu hoặc quét bề mặt bằngcông nghệ laser . Một số lĩnh vực ứng dụng tồn tại chủ yếu khác nhau về sức mạnh của laser được sử dụng và trong kết quả của quá trình quét. Công suất laser thấp được sử dụng khi bề mặt quét không bị ảnh hưởng, ví dụ như khi nó chỉ phải được số hóa. Quét laser tiêu điểm hoặc 3D là phương pháp để có được thông tin về bề mặt được quét. Một ứng dụng năng lượng thấp khác sử dụng các hệ thống chiếu ánh sáng có cấu trúc cho phép đo độ phẳng của pin mặt trời, [24] cho phép tính toán ứng suất trong suốt hơn 2000 tấm wafer mỗi giờ. [25]
Công suất laser được sử dụng cho thiết bị quét laser trong các ứng dụng công nghiệp thường dưới 1W. Mức công suất thường ở mức 200 mW trở xuống nhưng đôi khi nhiều hơn.
Ứng dụng
Ngành xây dựng và kỹ thuật dân dụng
Điều khiển robot : ví dụ máy quét laser có thể hoạt động như “mắt” của robot. [26] [27]
Bản vẽ xây dựng cầu, nhà máy công nghiệp và di tích
Tài liệu về các di tích lịch sử [28]
Mô hình trang web và đặt ra
Kiểm soát chất lượng
Khảo sát số lượng
Giám sát tải trọng [29]
Thiết kế lại đường cao tốc
Thiết lập một dấu mốc của hình dạng / trạng thái có sẵn để phát hiện các thay đổi cấu trúc do tiếp xúc với các tải trọng cực đoan như động đất, va chạm tàu / xe tải hoặc hỏa hoạn.
Tạo bản đồ GIS ( hệ thống thông tin địa lý ) [30] và địa chất .
Quét laser dưới bề mặt trong các mỏ và lỗ rỗng Karst. [31]
Tài liệu pháp y [32]
Quy trình thiết kế
Tăng độ chính xác làm việc với các bộ phận và hình dạng phức tạp,
Phối hợp thiết kế sản phẩm bằng cách sử dụng các bộ phận từ nhiều nguồn,
Cập nhật quét CD cũ với những bản quét từ công nghệ hiện tại hơn,
Thay thế các bộ phận bị thiếu hoặc cũ hơn,
Tạo ra sự tiết kiệm chi phí bằng cách cho phép các dịch vụ thiết kế được xây dựng, ví dụ như trong các nhà máy sản xuất ô tô,
“Đưa nhà máy đến các kỹ sư” bằng các bản quét được chia sẻ trên web và
Tiết kiệm chi phí đi lại.
Giải trí
Máy quét 3D được ngành công nghiệp giải trí sử dụng để tạo ra các mô hình 3D kỹ thuật số cho phim , trò chơi video và mục đích giải trí. Chúng được sử dụng rất nhiều trong điện ảnh ảo . Trong trường hợp tồn tại tương đương thế giới thực của mô hình, việc quét đối tượng trong thế giới thực nhanh hơn nhiều so với tạo thủ công mô hình bằng phần mềm mô hình 3D. Thông thường, các nghệ sĩ điêu khắc các mô hình vật lý của những gì họ muốn và quét chúng thành dạng kỹ thuật số thay vì trực tiếp tạo các mô hình kỹ thuật số trên máy tính.

Chụp ảnh 3D
Ảnh tự sướng 3D ở tỷ lệ 1:20 được in bởi Shapeways bằng cách sử dụng in thạch cao, được tạo bởi công viên thu nhỏ Madurodam từ các hình ảnh 2D được chụp tại gian hàng ảnh Fantasitron của nó.
Gian hàng ảnh Fantasitron 3D tại Madurodam
Máy quét 3D đang phát triển để sử dụng máy ảnh để thể hiện các vật thể 3D một cách chính xác. [33] Các công ty đang nổi lên kể từ năm 2010 tạo ra chân dung 3D của mọi người (hình tượng 3D hoặc ảnh tự sướng 3D [34] ).

Thực thi pháp luật
Quét laser 3D được sử dụng bởi các cơ quan thực thi pháp luật trên toàn thế giới. Mô hình 3D được sử dụng cho tài liệu tại chỗ của: [35]
Hiện trường vụ án
Quỹ đạo đạn
Phân tích mẫu vết máu
Tái thiết tai nạn
Ném bom
Tai nạn máy bay, và nhiều hơn nữa
Kỹ thuật đảo ngược
Kỹ thuật đảo ngược của một thành phần cơ học đòi hỏi một mô hình kỹ thuật số chính xác của các đối tượng được sao chép. Thay vì một tập hợp các điểm, một mô hình kỹ thuật số chính xác có thể được biểu diễn bằng lưới đa giác , một tập hợp các bề mặt NURBS phẳng hoặc cong , hoặc lý tưởng cho các thành phần cơ học, mô hình rắn CAD. Máy quét 3D có thể được sử dụng để số hóa các thành phần hình dạng tự do hoặc thay đổi dần hình dạng cũng như hình học lăng trụ trong khi máy đo tọa độ thường chỉ được sử dụng để xác định kích thước đơn giản của mô hình lăng trụ cao. Những điểm dữ liệu này sau đó được xử lý để tạo ra một mô hình kỹ thuật số có thể sử dụng, thường sử dụng phần mềm kỹ thuật đảo ngược chuyên dụng.
Bất động sản
Đất hoặc tòa nhà có thể được quét thành mô hình 3d, cho phép người mua tham quan và kiểm tra tài sản từ xa, bất cứ nơi nào mà không cần phải có mặt tại khách sạn. [36] Hiện đã có ít nhất một công ty cung cấp các tour du lịch bất động sản ảo được quét 3d. [37] Một chuyến tham quan ảo điển hình sẽ bao gồm chế độ xem nhà búp bê, [38] bên trong chế độ xem, cũng như sơ đồ tầng.
Du lịch ảo / từ xa
Môi trường tại một nơi quan tâm có thể được nắm bắt và chuyển đổi thành mô hình 3D. Mô hình này sau đó có thể được công chúng khám phá, thông qua giao diện VR hoặc giao diện “2D” truyền thống. Điều này cho phép người dùng khám phá các địa điểm bất tiện cho việc đi lại. [39]
Di sản văn hóa
Đã có nhiều dự án nghiên cứu được thực hiện thông qua việc quét các địa điểm lịch sử và hiện vật cả cho mục đích tài liệu và phân tích. [40]
Việc sử dụng kết hợp các công nghệ quét 3D và in 3D cho phép sao chép các vật thể thật mà không sử dụng các kỹ thuật đúc thạch cao truyền thống , trong nhiều trường hợp có thể quá xâm lấn khi được thực hiện trên các cổ vật di sản văn hóa quý giá hoặc tinh tế. [41] Trong một ví dụ về kịch bản ứng dụng điển hình, mô hình gargoyle đã được mua bằng kỹ thuật số bằng máy quét 3D và dữ liệu 3D được tạo ra được xử lý bằng MeshLab . Mô hình 3D kỹ thuật số kết quả đã được đưa vào một máy tạo mẫu nhanh để tạo bản sao nhựa thực sự của đối tượng ban đầu.
Michelangelo
Năm 1999, hai nhóm nghiên cứu khác nhau bắt đầu quét các bức tượng của Michelangelo. Đại học Stanford với một nhóm do Marc Levoy [42] dẫn đầu đã sử dụng máy quét tam giác laser tùy chỉnh được chế tạo bởi Cyberware để quét các bức tượng của Michelangelo ở Florence, đáng chú ý là David , Prudai và bốn bức tượng trong Nhà nguyện Medici. Các bản quét đã tạo ra mật độ điểm dữ liệu của một mẫu trên 0,25 mm, đủ chi tiết để xem các dấu đục của Michelangelo. Những lần quét chi tiết này đã tạo ra một lượng lớn dữ liệu (lên tới 32 gigabyte) và việc xử lý dữ liệu từ các lần quét của anh mất 5 tháng. Khoảng cùng kỳ một nhóm nghiên cứu từ IBM , do H. Rushmeier và F. Bernardini đứng đầu đã quétPietà của Florence có được cả các chi tiết hình học và màu sắc. Mô hình kỹ thuật số, kết quả của chiến dịch quét Stanford, đã được sử dụng triệt để trong lần phục hồi bức tượng năm 2004 sau đó. [43]
Monticello
Năm 2002, David Luebke, et al. quét Monticello của Thomas Jefferson. [44]Một thời gian thương mại của máy quét laser chuyến bay, DeltaSphere 3000, đã được sử dụng. Dữ liệu máy quét sau đó được kết hợp với dữ liệu màu từ các bức ảnh kỹ thuật số để tạo ra Virtual Monticello và triển lãm Nội các của Jefferson trong Bảo tàng Nghệ thuật New Orleans năm 2003. Triển lãm Virtual Monticello mô phỏng một cửa sổ nhìn vào Thư viện của Jefferson. Triển lãm bao gồm một màn hình chiếu phía sau trên tường và một cặp kính âm thanh nổi cho người xem. Kính, kết hợp với máy chiếu phân cực, cung cấp hiệu ứng 3D. Phần cứng theo dõi vị trí trên kính cho phép màn hình thích ứng khi người xem di chuyển xung quanh, tạo ảo giác rằng màn hình thực sự là một lỗ trên tường nhìn vào Thư viện của Jefferson. The Jefferson ‘
Máy tính bảng Cuneiform
Các mô hình 3D đầu tiên của máy tính bảng cuneiform đã được mua lại ở Đức vào năm 2000. [45] Năm 2003, dự án được gọi là Digital Hammurabi đã mua máy tính bảng cuneiform với máy quét tam giác laser sử dụng mẫu lưới thông thường có độ phân giải 0,025 mm (0,00098 in). [46] Với việc sử dụng máy quét 3D độ phân giải cao của Đại học Heidelberg để mua máy tính bảng vào năm 2009, sự phát triển của Khung phần mềm GigaMesh bắt đầu trực quan hóa và trích xuất các ký tự hình nêm từ mô hình 3D. [47] Nó được sử dụng để xử lý ca. 2.000 máy tính bảng số hóa 3D của Bộ sưu tập Hilprecht ở Jenađể tạo bộ dữ liệu điểm chuẩn truy cập mở [48] và bộ sưu tập chú thích [49] mô hình máy tính bảng 3D có sẵn miễn phí theo giấy phép CC BY . [50]
Lăng mộ Kasubi
Một dự án quét 3D CyArk năm 2009 tại Lăng mộ Kasubi lịch sử của Nhật Bản , Di sản Thế giới của UNESCO , sử dụng Leica HDS 4500, đã tạo ra các mô hình kiến trúc chi tiết của Muzibu Azaala Mpanga, tòa nhà chính tại khu phức hợp và lăng mộ của Kabakas (Kings) của Uganda. Một vụ hỏa hoạn vào ngày 16 tháng 3 năm 2010, đã thiêu rụi phần lớn cấu trúc Muzibu Azaala Mpanga, và công việc tái thiết có thể dựa nhiều vào bộ dữ liệu do nhiệm vụ quét 3D tạo ra. [51]
“Mô hình của Rome cổ đại”
Năm 2005, Gabriele Guidi, et al. đã quét “Plastico di Roma antica”, [52] một mô hình của Rome được tạo ra trong thế kỷ trước. Cả phương pháp tam giác, cũng không phải thời gian của phương thức bay đều thỏa mãn các yêu cầu của dự án này bởi vì mục được quét vừa lớn vừa chứa các chi tiết nhỏ. Mặc dù vậy, họ phát hiện ra rằng một máy quét ánh sáng được điều chế có thể cung cấp cả khả năng quét một vật thể có kích thước của mô hình và độ chính xác cần thiết. Máy quét ánh sáng được điều chế được bổ sung bởi máy quét tam giác được sử dụng để quét một số phần của mô hình.
Các dự án khác
Dự án Cuộc gặp gỡ 3D tại Bảo tàng Khảo cổ Ai Cập Petrie nhằm mục đích sử dụng chức năng quét laser 3D để tạo ra một thư viện hình ảnh 3D chất lượng cao và cho phép triển lãm kỹ thuật số của các đồ tạo tác Ai Cập mỏng manh, English Di sản đã điều tra việc sử dụng quét laser 3D cho rộng rãi một loạt các ứng dụng để có được dữ liệu khảo cổ và điều kiện, và Trung tâm Bảo tồn Quốc gia ở Liverpool cũng đã tạo ra các bản quét laser 3D theo hoa hồng, bao gồm vật thể cầm tay và quét tại chỗ của các địa điểm khảo cổ. [53] Các Viện Smithsonian có một dự án gọi là Smithsonian X 3Dđáng chú ý về chiều rộng của các loại đối tượng 3D mà họ đang cố quét. Chúng bao gồm các vật thể nhỏ như côn trùng và hoa, đến các vật thể có kích thước của con người như Bộ đồ bay của Amelia Earhart đến các vật thể có kích thước phòng như Gunboat Philadelphia đến các di tích lịch sử như Liang Bua ở Indonesia. Cũng cần lưu ý, dữ liệu từ các bản quét này đang được cung cấp miễn phí cho công chúng và có thể tải xuống ở một số định dạng dữ liệu.
Medical CAD/CAM
Máy quét 3D được sử dụng để chụp hình dạng 3D của bệnh nhân trong chỉnh hình và nha khoa . Nó dần dần thay thế thạch cao tẻ nhạt đúc. CAD phần mềm / CAM này sau đó được sử dụng để thiết kế và sản xuất các orthosis , giả hay cấy ghép nha khoa .
Nhiều hệ thống CAD / CAM nha khoa và các hệ thống CAD / CAM của Phòng thí nghiệm nha khoa sử dụng công nghệ Máy quét 3D để chụp bề mặt 3D của chế phẩm nha khoa ( in vivo hoặc in vitro ), để tạo ra phục hồi kỹ thuật số bằng phần mềm CAD và cuối cùng tạo ra phục hồi cuối cùng bằng công nghệ CAM (như máy phay CNC hoặc máy in 3D). Các hệ thống ghế được thiết kế để tạo điều kiện cho việc quét 3D của một chế phẩm in vivo và tạo ra sự phục hồi (như Crown, Onlay, Inlay hoặc Veneer).
Đảm bảo chất lượng và đo lường công nghiệp
Việc số hóa các đối tượng trong thế giới thực có tầm quan trọng sống còn trong các lĩnh vực ứng dụng khác nhau. Phương pháp này được áp dụng đặc biệt trong đảm bảo chất lượng công nghiệp để đo độ chính xác kích thước hình học. Các quy trình công nghiệp như lắp ráp rất phức tạp, tự động hóa cao và thường dựa trên dữ liệu CAD (Computer Aided Design). Vấn đề là mức độ tự động hóa tương tự cũng được yêu cầu để đảm bảo chất lượng. Chẳng hạn, việc lắp ráp một chiếc xe hơi hiện đại là một nhiệm vụ rất phức tạp, vì nó bao gồm nhiều bộ phận phải khớp với nhau ở cuối dây chuyền sản xuất. Hiệu suất tối ưu của quá trình này được đảm bảo bởi các hệ thống đảm bảo chất lượng. Đặc biệt là hình học của các bộ phận kim loại phải được kiểm tra để đảm bảo rằng chúng có kích thước chính xác, khớp với nhau và cuối cùng hoạt động đáng tin cậy.
Trong các quy trình tự động hóa cao, các biện pháp hình học thu được được chuyển đến các máy sản xuất các vật thể mong muốn. Do sự không chắc chắn và mài mòn cơ học, kết quả có thể khác với danh nghĩa kỹ thuật số của nó. Để tự động nắm bắt và đánh giá các độ lệch này, phần được sản xuất cũng phải được số hóa. Với mục đích này, máy quét 3D được áp dụng để tạo các mẫu điểm từ bề mặt của đối tượng cuối cùng được so sánh với dữ liệu danh nghĩa. [54]
Quá trình so sánh dữ liệu 3D với mô hình CAD được gọi là So sánh CAD và có thể là một kỹ thuật hữu ích cho các ứng dụng như xác định kiểu hao mòn trên khuôn và dụng cụ, xác định độ chính xác của bản dựng cuối cùng, phân tích khoảng cách và tuôn ra hoặc phân tích cao bề mặt điêu khắc phức tạp. Hiện nay, máy quét tam giác laser, ánh sáng có cấu trúc và quét tiếp xúc là những công nghệ chiếm ưu thế được sử dụng cho mục đích công nghiệp, với chức năng quét tiếp xúc vẫn là lựa chọn chậm nhất, nhưng chính xác nhất. Tuy nhiên, công nghệ quét 3D mang lại những lợi thế khác biệt so với các phép đo đầu dò cảm ứng truyền thống. Máy quét ánh sáng trắng hoặc laser số hóa chính xác các vật thể xung quanh, chụp các chi tiết đẹp và bề mặt tự do mà không cần điểm tham chiếu hoặc phun. Toàn bộ bề mặt được bao phủ ở tốc độ kỷ lục mà không có nguy cơ làm hỏng bộ phận. Biểu đồ so sánh đồ họa minh họa độ lệch hình học của cấp độ đối tượng đầy đủ, cung cấp cái nhìn sâu sắc hơn về nguyên nhân tiềm năng.[55]
Vòng tròn chi phí vận chuyển và thuế xuất nhập khẩu quốc tế
Quét 3D có thể được sử dụng cùng với công nghệ in 3D để dịch chuyển tức thời một số đối tượng nhất định qua các khoảng cách mà không cần vận chuyển chúng và trong một số trường hợp phải chịu thuế xuất nhập khẩu. Ví dụ, một vật thể bằng nhựa có thể được quét 3d ở Hoa Kỳ, các tệp có thể được gửi đến một cơ sở in 3d ở Đức nơi đối tượng được sao chép, dịch chuyển tức thời đối tượng trên toàn cầu. Trong tương lai, khi công nghệ quét 3D và in 3D ngày càng phổ biến, các chính phủ trên thế giới sẽ cần xem xét lại và viết lại các thỏa thuận thương mại và luật pháp quốc tế.
Nguồn: https://en.wikipedia.org/wiki/3D_scanning
