Một máy móc chạy bằng điện là sự liên kết giữa một hệ thống điện và hệ thống cơ khí. Quá trình chuyển đổi năng lượng từ một trong những dạng này sang một dạng khác đó chính là một sự chuyển đổi của năng lượng điện cơ. Trong những máy móc này, quá trình này có thể được đảo ngược. Nếu sự chuyển đổi là từ cơ khí sang điện, thì máy sẽ hoạt động như một máy phát điện, và nếu như sư chuyển đổi là từ điện sang cơ khí, thì máy sẽ hoạt động như một động cơ
Có ba loại máy điện được sử dụng một cách rộng rãi với mục đích chuyển chuyển đổi năng lượng điện cơ là động cơ DC, động cơ không đồng bộ và động cơ đồng bộ. Các loại động cơ khác là động cơ nam châm vĩnh cửu (PM), động cơ từ trễ, và động cơ bước. Sự chuyển đổi từ năng lượng điện sang cơ khí dựa vào hai nguyên lý của nam châm điện: khi một dây dẫn điện chuyển động trong một từ trường, một điện áp sẽ được tạo ra trong vật dẫn điện; đồng thời, khi một vật dẫn mang dòng điện được đặt trong từ trường, thì vật dẫn sẽ chịu một lực cơ học. Trong động cơ, một hệ thống điện cho dòng điện đi qua vật dẫn đặt trong một từ trường và một lực được tác dụng lên mỗi vật dẫn. Nếu như các vật dẫn điện được đặt trên một cấu trúc có thể quay tự do, một mô-men điện từ sẽ được sinh ra, làm toàn bộ cấu trúc quay. Cấu trúc quay này được gọi là rotor. Phần tử trong máy không di chuyển và cung cấp một lực từ được gọi là stator. Thông thường thì đây là phần khung vỏ bên ngoài của máy hoặc động cơ với những ngoại lệ trong một số trường hợp đặc biệt như con lăn điện.
Stator và rotor được làm từ vật liệu sắt từ (giàu sắt). Lõi sắt được sử dụng để tối đa hóa sự kết hợp giữa cuộn dây có lõi, làm gia tăng mật độ từ thông trong động cơ và vì vậy cho phép kích thước của nó giảm bớt lại. Trong hầu hết các loại động cơ, các rãnh được xẻ theo chu vi trong của mặt ngoài của stator và chu vi ngoài của rotor và các vật dẫn điện được đặt trong các rãnh đó. Nếu các tín hiệu điện thay đổi theo thời gian được đặt trong stator hoặc rotor (hoặc cả hai), nó sẽ gây ra một mô-men cơ học được gây ra bởi rotor. Các vật dẫn điện được đặt trong các rãnh được nối thông với nhau để tạo thành dây quấn, dây quấn sẽ cho phép dòng điện đi qua để tạo ra nguồn từ thông chính goi là cuộn kích, mặc dù trong một số động cơ thì nguồn từ thông chính là một PM.
Động cơ điện sử dụng trong nhiều ứng dụng khác nhau của các hệ thống tự động, từ máy thổi, máy bơm, quạt cho đến băng tải, robotic, và các bộ truyền động.Chúng có thể được cấp nguồn bằng nguồn AC từ một mạng lưới điện bên trong nhà máy hoặc bộ điều khiển động cơ, hoặc nguồn điện DC từ pin hoặc một máy biến áp. Động cơ có thể được phân loại tùy theo các phương pháp cấu tạo, theo nguồn cung cấp của chúng, hoặc ứng dụng của chúng và các kiểu chuyển động mà chúng cung cấp. Trong lĩnh vực công nghiệp, động cơ điện thông thường được chuẩn hóa về kích thước và mã lực hoặc dải công suất.
1 Động cơ AC
Một động cơ AC thông thường bao gồm hai phần: một stator có cuộn dây cảm ứng cho dòng điện AC đi qua để tạo ra chuyển động xoay từ trường và phần trong rotor được gắn thêm một trục bên ngoài. Rotor sẽ cung cấp một mô-men xoắn bằng từ trường quay được tạo ra bởi dòng điện xoay chiều.
Động cơ AC thường các thiết kế liên quan đến các cấu trúc vật lý của chúng như TE, FC, và PM. Một số thông số khác , như kích thước khung, cũng mô tả được tính chất vật lý của động cơ, bao gồm cả các phần gắn kết, phương pháp lắp ghép, và kích thước trục. Một catalog về động cơ hoàn chỉnh sẽ miêu tả các thông số lựa chọn phù hợp.
Động cơ đồng bộ
Một động cơ đồng bộ là một thiết bị sử dụng điện AC bao gồm một rotor xoay ở tốc độ tương đương với dòng điện xoay chiều khi chịu tác dụng. Quá trình này được thực hiện bằng cách kích vào cuộn từ của rotor bằng dòng điện một chiều. Khi rotor quay, điện áp được sinh ra dòng điện cảm ứng của cuộn dây phần ứng điện của stator, điều này sẽ sinh ra một từ trường quay có tốc độ tương đương với tốc độ của rotor. Không giống với động cơ cảm ứng từ, một động cơ đồng bộ sẽ không bị trượt khi hoạt động ở một tốc độ nhất định.
Vòng trượt và chổi quét được sử dụng để dẫn dòng điện đến rotor. Các cực của rotor kết nối với nhau và chuyển động ở cùng một tốc độ; vì vậy nó có tên là động cơ đồng bộ. Động cơ đồng bộ được sử dụng chính trong các ứng dụng mong muốn điều khiển tốc độ cố định và nó cũng không thông dụng trong các ứng dụng công nghiệp như động cơ cảm ứng từ.
Một vấn đề với động cơ đồng bộ chúng không thể tự khởi động. Nếu một điện áp AC được sử dụng cho điểm đầu cuối của stator và rotor được kích bởi dòng kích từ, thì động cơ chỉ đơn giản là rung lên. Điều này là do điện áp AC được sử dụng lên điểm đầu cuối stator thì lập tức làm quay stator ở tần số 60Hz, điều này là quá nhanh cho các cực của rotor có thể bắt kịp. Với lý do đó mà động cơ đồng bộ phải được khởi động bằng cách cung cấp một giá trị tần số (như một sự điều khiển) hoặc khởi động bằng máy như động cơ cảm ứng từ. Nếu như một bộ điều khiển không được sử dụng, thì sẽ có thêm một cuộn dây được sử dụng có tên là cuộn hãm. Trong ví dụ này, cuộn từ sẽ không được kích bởi dòng điện DC nhưng nó sẽ được phân dòng bởi một điện trở. Dòng điện được sinh ra trong cuộn hãm, sẽ tạo ra một mô-men xoắn; giống như để động cơ đạt được sự đồng bộ về tốc độ, thì điện áp DC được sử dụng cho rotor và động cơ sẽ khóa trên trường stator.
Động cơ đồng bộ ba pha AC
Stator của động cơ đồng bộ ba pha có một cuộn quấn rải được gọi là cuộn ứng. Nó được kết nối với nguồn AC và được thiết kế để chịu được điện áp và dòng điện cao. Dòng điện DC được đưa vào cuộn dây của rotor thông qua vòng trượt và chổi quét từ các nguồn riêng biệt. Điều này sẽ tạo nên một trường tiếp tục, và rotor sẽ quay một cách đồng bộ với dòng điện xoay chiều được sử dụng trên stator.
Động cơ đồng bộ có thể được chia làm hai kiểu cấu trúc riêng biệt: động cơ tốc độ cao với rotor hình trụ và động cơ tốc độ thấp với rotor cực lồi. Đối với động cơ cực không lồi hoặc động cơ hình trụ sẽ có một cuộn quấn rải và một khe hở không khí giữa rotor và stator. Rotor thường dài và có đường kính nhỏ hơn. Những động cơ này thường được dùng trong máy phát điện.
Động cơ cực lồi có một cuộn dây tập trung trên các cực của động cơ và một rãnh khí không đều . Rotor sẽ ngắn hơn và có đường kính lớn hơn rotor hình trụ của động cơ đồng bộ. Cực lồi của các động cơ thường được sử dụng điều khiển máy bơm hoặc máy trộn.
Một cách dùng của các loại động cơ đồng bộ là sử dụng chính sơ đồ điều chỉnh hệ số công suất của nó; những thông số này liên quan đến các thiết bị ngưng tụ đồng bộ. Phương pháp này một tính năng của động cơ ở những điểm động cơ tiêu thụ công suất tại hệ số công suất cao nhất khi rotor bị kích quá mức. Chúng xảy ra đối với nguồn cấp làm chúng trở thành một tụ điện, và rồi có thể được sử dụng để sửa chữa độ trễ của hệ số công suất, là thứ thường được xuất hiện nguồn cấp điện bởi tải cảm ứng. Bởi vì các nhà máy được nạp thêm cho việc tiêu thụ điện năng của họ nếu hệ số công suất quá thấp, điều này có thể giúp cho việc sửa chữa lại biên dạng năng lượng của nhà máy. Sự kích thích có thể được hiệu chỉnh cho đến gần mức hệ số công suất cần đạt. Động cơ thường được sử dụng cho mục đích này để dễ dàng xác định vì chúng không có phần mở rộng trục.
Động cơ đồng bộ một pha
Động cơ một pha AC loại nhỏ cũng có thể được thiết kế với rotor PM. Bởi vì rotor trên những động cơ này không cần yêu cầu dòng điện cảm ứng, chúng cũng không trượt lại đối với tần số của stator, thay vào đó, chúng quay một cách đồng bộ. Vì chúng được đồng bộ một cách vô cùng chính xác với tần số được sử dụng, là thứ được quy định rất cẩn thận tại nguồn điện của các nhà máy, nên những động cơ này thường được sử dụng cấp nguồn cho các đồng hồ cơ học, bản ghi chép, hoặc bất cứ thứ gì yêu cầu một tốc độ chính xác.
Động cơ đồng bộ trễ sử dụng tính chất trễ của vật liệu từ tính để sinh ra mô-men xoắn. Rotor là một hình trụ trơn làm bằng hợp kim có từ tính luôn nhiễm từ nhưng có thể bị khử từ dễ dàng cũng như tái từ tính với các cực ở các vị trí mới. Cuộn dây stator được phân phối để sinh ra từ thông hình sin. Vởi vì độ trễ của rotor từ dựa vào độ trễ sau từ trường quay. Chúng tạo nên một mô-men xoắn cố định cho tới sự động bộ về tốc độ, một tính năng hữu ích cho các ứng dụng. Động cơ trễ sẽ hoạt động im lặng và trơn tru hơn; tuy nhiên, chúng sẽ mắc tiền hơn động cơ từ trở ở cùng phần khúc.
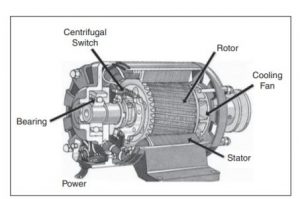
Động cơ từ trở có một pha được phân bố làm dạng cuộn dây stator và rotor dạng lồng, thường gọi là “lồng sóc”. Đây là một dạng rotor hình trụ với các thành ngang xung quanh chu vi. Trong động cơ từ trở, một số thanh ngang này sẽ được bỏ đi. Stator của động cơ từ trở một pha có một cuộn dây chính và một cuộn đề. Khi stator được kết nối với nguồn một pha, động cơ hoạt động như một động cơ cảm ứng từ. Một công tắc ly tâm sau đó được dùng để ngắt cuộn phụ khoảng 75 phần trăm so với tốc độ đồng bộ. Động cơ tiếp tục đạt được tốc độ cho đến khi nó được đồng bộ với từ trường quay. Động cơ từ trở thường được dùng với mã lực lớn hơn nhiều lần so với các động cơ cõ cùng mã lực được kích bằng dòng DC; tuy nhiên, vởi vì chúng không có vòng trượt , chổi quét, hoặc cuộn từ, nên giá của nó sẽ rẻ và có thể bảo trì miễn phí. Động cơ một pha lồng sóc được thể hiện trong hình 1
Động cơ không đồng bộ
Động cơ cảm ứng từ là loại động cơ chắc chắn nhất và được sử dụng rộng rãi trong các ứng dụng công nghiệp. Một động cơ cảm ứng từ có một stator và rotor với một khe không khí giữa hai cuộn dây của động cơ. Rotor được gắn trên bạc đạn và được làm từ nhiều lớp kim loại sắt từ với các rãnh cắt ở ngoài bề mặt. Cuộn dây rotor có thể là kiều lồng sóc hoặc kiểu được rotor quấn. Stator cũng được làm nhiều lớp thép cùng với cuộn dây quấn rải. Trong động cơ cảm ứng từ, dòng điện xoay chiều được áp dụng cho cả hai cuộn rotor và stator.
Động cơ cảm ứng từ 3 pha AC
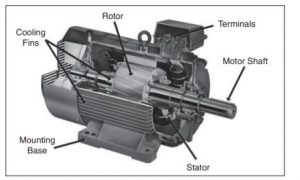
Cả hai cuộn dây rotor và stator của động cơ ba pha được phân phối ở nhiều rãnh trong các lớp của tầm kim loại. Điểm đầu cuối của cuộn rotor được kết nối với 3 vòng trượt, sử dụng trong chổi quét tĩnh, rotor sau đó có thể được kết nối với một mạch ngoài. Nguồn điện được sử dụng cho cuộn dây 3 pha của rotor và stator sinh ra từ trường quay một góc 120 độ, như được thể hiện trong dạng sóng của nguồn điện 3 pha. Một mô hình cắt trong của một động cơ cảm ứng từ 3 pha được thể hiện trong hình 2
Dòng điện được sinh ra trong rotor bởi từ trường quay của stator. Khi stator quay, thì tốc độ tương đối của rotor và từ trường giảm bớt vì tốc độ động cơ tăng. Nếu như tốc độ rotor đạt đến tốc độ từ trường quay, thì rotor sẽ không cung cấp mô-men xoắn. Sự khác biệt giữa tốc độ rotor và tốc độ đồng bộ được gọi là độ trượt. Khi chịu tải, một động cơ tiêu chuẩn sẽ độ trượt là 2-3 phần trăm, một động cơ 3 pha 60Hz thông thường quay được 1725-1750rpm ngược lại so với tốc độ tính toán là 1800rpm.
Động cơ cảm ứng từ là động cơ AC được sử dụng rộng rãi nhất trong công nghiệp tự động và được sản xuất theo khung tiêu chuẩn có kích thước lên đến 500kW hoặc 670 mã lực. Điều này làm chúng có thể dễ dàng thay đổi, mặc dù tiêu chuẩn của Châu Âu và Bắc Mỹ là khác nhau.
Động cơ cảm ứng từ 1 pha AC
Hầu hết động cơ cảm ứng từ một pha đều có rotor lồng sóc và một cuộn stator quấn rải 1 pha. Một số động cơ cảm ứng từ sử dụng rotor quấn, nhưng chúng lại không được thông dụng. Động cơ lồng sóc có được cái tên đó nhờ vào hình dạng của nó – một cái vòng ở điểm cuối của rotor được nối bởi nhiều thanh ngang dọc theo chiều dài của nó, tạo nên hình dạng của một cái lồng.
Động cơ cảm ứng từ một pha được phân loại dựa vào các phương thức được sử dụng để khởi động chúng. Một số loại thông dụng được trở kháng khởi động hoặc chia pha, tụ khởi động, tụ động cơ, hoặc cực bóng .
Động cơ cảm ứng từ chia pha có một cuộn dây chính và một cuộn dây phụ trên stator. Cuộn phụ được sử dụng để khởi động như đã mô tả trong động cơ đồng bộ trở kháng. Hai cuộn dây được đặt lệch nhau một góc 90 độ và dòng điện của hai cuộn dây được chuyển đổi pha với nhau. Điều này sinh ra một mô-men khởi động; cuộn phụ có thể được loại bỏ khỏi mạch và sử dụng công tắc ly tâm như đã mô tả trước đó. Nếu một tụ được đặt một loạt với cuộn phụ, một góc lệch pha lớn hơn sẽ được tạo ra, tạo nên mô-men khởi động lớn hơn. Giá thành của động cơ này cũng mắc hơn đổi chút so với loại chia pha thông thường, bởi vì mạch chỉ sử dụng khi khởi động một tụ điện phân AC rẻ tiền.
Đối với động cơ có tụ, tụ khởi động và cuôn phụ sẽ không được loại bỏ khỏi mạch khi đang chạy hết tốc độ. Điều này yêu cầu một loại tụ khác, thường là loại dầu giấy AC. Mặc dù tụ điện này mắc hơn so với loại điện phân, nhưng công tắc ly tâm sẽ được loại bỏ nhằm giảm bớt giá thành. Mô-men khởi động sẽ không lớn bằng loại tụ khởi động, tuy nhiên động cơ sẽ chạy im lặng hơn.
Nếu tối ưu cả hai mô-men khởi động và mô-men vận hành là một ước muốn, thì sự kết hợp giữa phương án khởi động có tên gọi là tụ đề tụ chạy có thể được sử dụng. Đây là nơi các tụ điện phân được đặt theo một dãy với cuốn phụ và một dãy tụ dầu giấy có giá trị nhỏ đặt với cuộn chính. Loại động cơ này sẽ mắc hơn các loại còn lại, tuy nhiên chúng lại cung cấp khả năng vận hành tốt nhất.
Động cơ cực bóng sử dụng cấu trục cực lồi như đã mô tả trong phần động cơ đồng bộ. Cuộn chính được quấn trên cực lồi, nhưng một vòng quay đồng đoản mạch được đặt giữa cuộn chính và rotor, “bóng” từ thông làm rotor quay. Điều này tạo ra một lực mô men nhỏ. Phương pháp này được sử dụng trong các ứng dụng mô men nhỏ, như trong quạt và các thiết bị nhỏ khác.
Động cơ khởi động trở kháng là một động cơ cảm ứng từ chia pha với một điện trở được chèn trong thành một dãy với cuộn khởi động, tạo ra mô men khởi động. Điện trở mang lại sự hỗ trợ khi khởi động và chiều quay ban đầu mà không tạo ra dòng điện dư thừa. Mô men khởi động trong động cơ có khởi động trở kháng sẽ lớn hớn so với động cơ cực bóng hoặc động cơ có tụ chạy, nhưng sẽ không cao bằng loại có tụ khởi động.
2 Động cơ DC
Một động cơ DC đặt một cuộn ứng trên rotor và cuộn từ trên stator, là nơi ngược lại với các động cơ AC như đã miêu tả trước đây. Chúng được thiết kế để vận hành với nguồn điện DC, mặc dù động cơ có thể thay đổi chiều dòng điện trong cuộn dây thông qua cổ góp. Stator có các cực lồi được kích bởi một hoặc nhiều cuộn từ; chúng tạo ra một từ trường đối xứng xung quanh các các trục cực, còn được gọi là trục từ hoặc trục chính. Điện áp được sinh ra trong cuộn ứng thay đổi bằng cách sử dụng một bàn chải cổ góp như một thiết bị chỉnh lưu cơ học. Ngoài ra, một động cơ DC không chổi than sử dụng một công tắc ngoài điện được đồng bộ với vị trí của rotor.
Cuộn từ và cuộn ứng có thể được kết nối theo nhiều cách khác nhau cung cấp các tính năng xử lý khác nhau. Cuộn từ có thể được kết nối nối tiếp, dạng nhánh (song song với cuộn ứng), hoặc là sự kết hợp của cả hai, được gọi là động cơ phức hợp. Các động cơ DC cũng có cả PM.
Động cơ DC có chổi than
Cuộn từ được đặt trên stator để kích cho cực từ và cuộn ứng được đặt trong rotor. Một cổ góp bao gồm một vòng trượt được kết nối tới mỗi điểm cuối của cuộn dây rotor. Điện áp DC kế tiếp được sử dụng cho chổi quét; để làm cho rotor quay, chổi quét tiếp xúc với nửa vòng trượt khác, làm thay đổi chiều dòng điện và tạo nên một từ trường thay thế. Từ trường này không bao giờ thẳng hàng với các cực lồi của stator, từ trường này giữ cho rotor chuyển động.
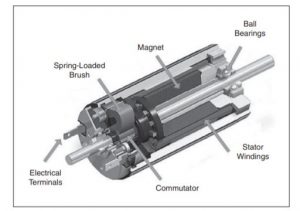
Sẽ có nhiều hơn một bộ vòng và cực và chúng thường được sử dụng trong các động cơ DC lớn hơn. Khoảng cách giữa trung tâm các cực liền kề được biết đến là bước cực từ, trong khi sự khác nhau giữa về khoảng cách giữa hai mặt cuộn dây thì được gọi là bước cuộn dây. Nếu bước cuộn dây và bước cực bằng nhau, thì chúng được gọi là cuộn dây đủ bước. Một bước cuộn dây ngắn hơn bước cực là gọi là cuộn dây bước ngắn hoặc cuộn dây bước lẻ. Động cơ AC thường có cuộn dây bước ngắn, trong khi động cơ DC thì lại có cuộn dây đủ bước. Hình 3 sẽ minh họa cấu trúc của một cuộn dây DC có chổi than.
Các điểm bất lợi của chổi than
Bởi vì chổi than liên tục bị mòn do chúng phải nén lại với vành cổ góp, nên cuối cùng chúng thường phải được thay thế. Chổi quét cũng tạo ra các tia lửa vì chúng đi qua khe cách điện trong cổ góp. Ở tốc độ cao chổi than sẽ có một khoảng thời gian khó duy trì tiếp xúc với cổ góp hơn; điều này cũng tạo ra các tia lửa. Tia lửa có thể làm lủng lỗ trên bề mặt cổ góp, tạo ra sự mất cân đối và làm bật các tiếp điểm của chổi than, gây ra nhiều tia lửa hơn. Chúng có thể bị quá nhiệt và cuối cùng là phá hủy cổ góp và chổi than. Động cơ DC có chổi than cũng tạo ra một số tiếng ồn vì những tia lửa này, và tốc độ tối đa bị giới hạn.
Một số các vấn đề được tạo ra bởi chổi than được loại bỏ trong động cơ không chổi than, là động cơ sử dụng lâu dài và hiệu quả hơn khi chúng dùng năng lượng.
Một số vấn đề của động cơ DC có chổi than được loại bỏ trong thiết kế không chổi quét. Trong động cơ này, công tắc xoay cơ khí hoặc bánh răng cổ ghép lắp ráp được thay thế bởi một công tắc ngoài đồng bộ với vị trí rotor. Động cơ không chổi than thông thường mang lại hiệu suất từ 85 đến 90 phần trăm hoặc hơn ( hiệu suất cao hơn đối với động cơ điện không chổi quét lên đến 96.5 phần trăm đã được ghi nhận lại bởi Đại học Tokai ở Nhật Bản năm 2009), ngược lại thì động cơ DC có chổi than chỉ mang lại hiệu suất từ 75 đến 80 phần trăm.
Động cơ không chổi than
Động cơ không chổi than DC được thay thế chổi than và cổ góp thành một xung điện chuyển đổi được đồng bộ với vị trí của rotor. Cảm biến hiệ ứng Hall được sử dụng để đo vị trí của PMs trên rotor và cuộn điều khiển được kích hoạt một cách liên tục. Cuộn dây thường được sắp xếp theo nhóm 3, hoạt động tương tự với động cơ đồng bộ 3 pha.
Một phương pháp khác để xác định vị trí rotor bằng cách phát hiện lực điện động ngược trong cuộn điều khiển không được kích hoạt. Điều này cho phép điều khiển điển để xác định được vận tốc và vị trí của động cơ. Các động cơ này thường được sử dụng trong các ứng dụng cần đến sự chính xác về điều khiển tốc độ.
Động cơ DC không chổi than sử dụng lâu dài hơn loại có chổi than và chạy mát hơn so với động cơ AC. Chúng vận hành rất yên lặng về mặc tiếng ồn lẫn âm thanh. Bởi vì chúng không tạo ra các tia lửa như động cơ có chổi quét, thì chúng sẽ phù hợp cho môi trường cháy nổ và môi trường hóa học.
Động cơ DC coreless hoặc ironless
Một động cơ có thể tăng tốc rất nhanh đó chính là động cở coreless hoặc ironless. Động cơ này đảm bảo sẽ có một rotor rất nhẹ bằng cách quấn chính nó như môt cuộn dây mà không có thêm các vật liệu thép hoặc sắt từ trong rotor. Phương pháp này có thể được sử dụng cho động cơ có chổi than và cổ góp hoặc động cơ không chổi than. Rotor có thể được đặt bên phía nam châm stator hoặc làm thành dạng giống như một cái rổ hình trụ bên ngoài stator. Việc quấn dây cho rotor thường được đóng gói trong nhựa epoxy để mang lại độ bền vật lý. Các loại động cơ này thường nhỏ. Chúng có thể tạo ra một ít nhiệt vì chúng không có kim loại để có thể thực hiên như một bộ tản nhiệt; chúng thường đòi hỏi một cách làm mát, như ép khí vào cuộn dây rotor.
Động cơ vạn năng và động cơ DC quấn nối tiếp
Động cơ DC với cuộn từ và cuộn ứng được đặt nối tiếp cho phép động cơ có thể chạy ở nguồn DC hoặc AC. Những động cơ này được gọi là động cơ vạn năng hoặc động cơ quấn nối tiếp. Mặc dù chúng rất đa dạng trong việc sử dụng nguồn, nhưng chúng lại có vài điểm bất lợi khi so sánh với các loại động cơ DC và AC.
Với một động cơ vạn năng khi tự tăng tốc, thì mô-men xoắn ngoài của động cơ lại giảm, làm cho chúng không thực hiện được các ứng dụng sử dụng mô-men lớn tốc độ cao. Khi không có tải, động cơ có thể bị “run away”, gây tổn hại nghiêm trọng cho động cơ. Một tải dài hạn như quạt mát thường được gắn với một cái trục để hạn chế tình trạng này. Mô-men khởi động lớn có thể rất hữu ích trong một số ứng dụng khởi động.
Động cơ vạn năng hoạt động tốt hơn khi sử dụng nguồn DC và là động cơ tốt nhất khi sử dụng không liên tục. Điều khiển tốc độ chính xác cũng có thể là một vấn đề.
3 Động cơ tuyến tính
Động cơ tuyến tính hoạt động theo một tính chất tương tự với các loại động cơ điện tiêu chuẩn ngoại trừ rotor và stator được đặt kế nhau trong kiểu tuyến tính. Các loại động cơ tuyến tính nói chung được phân loại the gia tốc cao hoặc thấp. Động cơ cảm ứng từ tuyến tính AC (LIMs) được sử dụng cho các ứng dụng gia tốc cao. Thông thường chúng sử dụng một cuộn stator nguồn với một tấm dẫn như một rotor đang chịu tải.
Động cơ đồng bộ tuyến tính (LSMs) được sử dụng với những yêu cầu về động cơ lớn chịu tải nặng và mô-men lớn. Chúng cũng sử dụng một cuộn stator nguồn nhưng lại sử dụng một mảng cực nam châm xen kẽ được gắn với khung chịu tải như rotor. Những động cơ này có gia tốc thấp hơn loại LIM.
