Động cơ servo và động cơ bước
Động cơ servo được thiết kế đặc biệt và được xây dựng để sử dụng hệ thống điều khiển phản hồi. Điều này yêu cầu một bộ đáp ứng tốc độ cao, là thứ mà động cơ servo có được bằng việc có một rotor quán tính thấp. Vì vậy động cơ servo được sử dụng sẽ có đường kính nhỏ hơn và chiều dài dài hơn các loại động cơ AC hoặc DC có cùng hình thức. Chúng thường được hoạt động tốc độ thấp hoặc tốc độ 0, điều đó làm chúng thường lớn hơn các loại động cơ thông thường với cùng một giá trị nguồn cấp tương tự. Giá trị đính của mô-men thường gấp 3 lần giá trị mô-men, đôi khi có thể lên tới 10 lần.
Tỉ lệ công suất của động cơ servo có thể xếp loại từ vài watt đến vài trăm watt. Với một dải công suất cụ thể, quán tính khác nhau cũng có thể được nêu rõ bởi các nhà sản xuất động cơ. Chúng thường được sử dụng rộng rãi trong các ứng dụng về công nghiệp, như robot, công cụ máy móc, hệ thống điều khiển vị trí và điều khiển quá trình. Cả hai loại động cơ servo AC và DC đều được sử dụng trong công nghiệp.
Động cơ servo không chổi quét thường được sử dụng trong quan hệ giao hoán dạng sin để tạo ra các chuyển động trơn tru ở tốc độ thấp. Nếu như phương pháp giao hoán hình thang truyền thống hoặc giao hoán “6 bước” DC được sử dụng, động cơ có xu hướng bị khựng hoặc giật khi chuyển động ở tốc độ thấp, một phần là do quán tính thấp của động cơ servo. Các động cơ xoay nhờ vào mô-men được sinh ra nhờ tương tác từ trường của rotor và stator. Mô-men tỉ lệ với từ trường nhân với sin của góc giữa chúng. Mô-men tối đa được sinh ra khi góc của rotor và stator là 90. Mô-men có thể đươc điều khiển bằng các góc giữa hai dạng sóng. Để tìm ra mối quan hệ giữa vị trí của rotor và stator, một encoder giao hoán có thể được sử dụng để tìm ra mối quan hệ giữa các góc lệch pha với nhau.
Động cơ servo được điều khiển bởi bộ điều khiển servo , là thứ cung cấp chính xác về vận tốc, mô-men, và điều khiển vị trí bằng encoder, resolver, hoặc tín hiệu dòng bao gồm các tín hiệu phản hồi của một cơ cấu servo. Các thành phần thêm của một cơ cấu truyền động servo là công tắc về home để khởi tạo vị trí tham chiếu và công tắc quá hành trình để ngăn chặn cơ cấu truyền động hoặc công cụ bị tổn hạ.
Đông cơ servo DC
Động cơ servo DC có thể được kích riêng biệt hoặc bằng động cơ PM DC. Nguyên lý hoạt động tương tự như đã mô tả trong chương 3.6.2 về động cơ DC. Chúng thường được điều khiển các điện áp cảm ứng, là điện áp có trở kháng lớn, bảo đảm rằng tỉ lệ tốc độ mô-men là tuyến tính. Mô-men trả về rất nhanh trong các động cơ này, làm chúng trở nên lý tưởng trong việc thay đổi nhanh vị trí hoặc tốc độ.
Servo AC
Servo AC có cấu trúc rất khỏe và có quán tính thấp hơn so với đông cơ servo DC, tuy nhiên, chúng lại không tuyến tính về sự phản hồi mô-men tốc độ. Chúng cũng tạo ra mô-men nhỏ hơn so với động cơ servo DC cùng kích thước.
Hầu hết các loại servo AC là động cơ hai pha lồng sóc. Stator của chúng có hai cuộn quấn rải dịch chuyển 90 độ. Một cuộn, là cuộn pha tham chiếu hoặc cuộn cố định pha, được kết nối với một nguồn điện không đổi. Cuộn còn lại được gọi là cuộn pha điều khiển và được cấp bởi một giá trị điện áp ở cùng tần số như pha tham chiếu. Đối với các ứng dụng công nghiệp, tần số thường là 60Hz. Điện áp điều khiển pha được cấp bởi một bộ khuếch đại servo, là thứ sẽ điều khiển chiều quay bằng cách chuyển đổi pha dương hoặc pha âm một góc 90 từ điện áp tham chiếu.
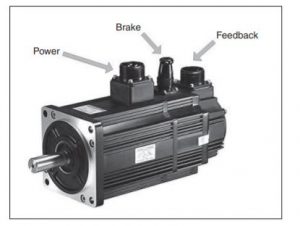
Hình 1 cho thấy một dạng động cơ servo AC với các cáp điện kết nối. Một hộp số thường được gắn liền với mặt bích của động cơ.
Rotor dạng lồng sóc có trở kháng cao cuộn rotor của động cơ DC, nhiều loại trở kháng cung cấp các tính năng khác nhau về mô-men tốc độ. Trở kháng thấp làm giảm mô-men ở tốc độ thấp và ngược lại, tạo ra một đường cong không tuyến tính. Đây không phải là một hệ thống điều khiển như mong muốn.
Động cơ servo AC hai pha được chế tạo như một cơ cấu chấp hành tốc độ cao mô-men thấp và thường được giảm tốc độ để đạt được kết quả như mong muốn. Tốc độ điển hình của loại động cơ này là 3000 đến 5000 rpm.
Động cơ bước
Động cơ bước là một động cơ DC, xoay được một góc nhất định tùy theo cấu trúc động cơ, đó là số cực. Chúng sẽ chuyển đổi xung số ở đầu vào để quay trục, một chuỗi xung được tạo ra để làm quay trục động cơ theo bước. Điều này cho phép vị trí có thể được điều khiển một cách chính xác mà không cần một một cơ cấu phản hồi. Thông số thông thường của một động cơ bước hiện có trên thị trường được phân loại từ vài bước một vòng đến 400 bước một vòng. Chúng có thể theo tín hiệu lên đến 1200 xung một giây và có thể tăng tốc lên đến vài mã lực.
Có nhiều loại động cơ bước khác nhau, bao gồm cả loại động cơ miễn cưỡng một biến và nhiều biến và loại PM. Giá trị động cơ miễn cưỡng hoạt động bằng cách kích vào các cực stator, làm cho rotor tự căn chỉnh nó với từ trường. Các cực có thể được kết hợp để kích, cho phép rotor xếp thẳng hàng giữa các cực stator một cách trực tiếp với chúng. Có nhiều phiên bản sắp xếp các cực theo nhiều mức hoặc “stack”, cho phép việc định vị độ phân giải được mịn hơn bằng cách dịch pha từ stack này sang stack khác.
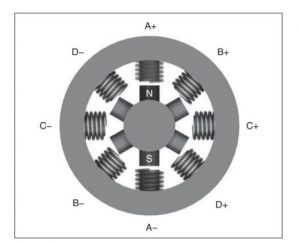
Động cơ bước PM sử dụng nam châm cho các cực rotor. Chúng có quán tính cao hơn động cơ biến miễn cưỡng và vì vậy chúng không thể tăng tốc nhanh, tuy nhiên chúng lại tạo ra nhiều mô-men hơn trong một Ampe dòng stator. Hình 2 cho thấy sự sắp xếp của một động cơ bước 4 cực PMs; cực A, B, C, D được kích tuần tự trong một chiều phân cực sau khi chiều phân cực được chuyển đổi để đạt được 8 vị trí trong một vòng.
Động cơ bước lai sử dụng một sự kết hợp của công nghệ biến miễn cưỡng và động cơ PM. Chúng cung cấp một công suất tối đa trong một gói kích thước. Động cơ bước lai là loại động cơ bước hầu như được sử dụng phổ biến trong tự động hóa công nghiệp.
Mặc dù động cơ bước có thể có giá thành rẻ hơn servo cho các ứng dụng định vị mà không yêu cầu tín hiệu phản hồi, động cơ bước không cung cấp nhiều mô-men như động cơ servo, đặc biệt là tốc độ cao.
Tín hiệu điều khiển cho các động cơ bước thường là các mạch logic công suất thấp sử dụng TTL hoặc transistor CMOS, tầng khuếch đại công suất được đặt giữa nơi tạo các chuỗi xung và các động cơ.
Biến tần
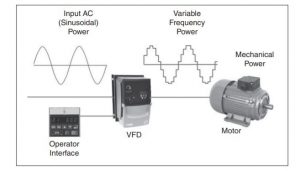
Biến tần (VFDs) là một thiết bị chuyển đổi dạng khối. Đầu tiên chúng chuyển đổi điện áp vào AC thành dạng DC, sau đó tái cấu trúc dạng sóng AC bằng cách nhanh nguồn DC với tần số mong muốn và điện áp sao cho ra được gần giống dạng tín hiệu hình sin. Bộ chỉnh lưu trong máy biến tần sẽ chuyển đổi điện áp vào sang dạng DC, thường là dạng 3 pha full bridge; nguồn 1 pha có thể được dùng cho các biến tần nhỏ. Hình 3.48 là sơ đồ của hệ thống này.
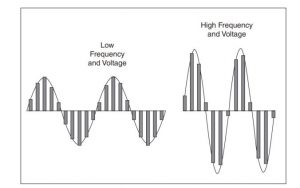
Để chuyển được một giá trị mô-men nhất quán khi tốc độ thay đổi, thì điện áp sử dụng phải được hiệu chỉnh theo một tỉ lệ với tần số. Nếu động cơ được xác định là 480VAC với 60Hz, điện áp phải được giảm xuống 240VAC với 30Hz, 120VAC với 15Hz, và tiếp tục như vậy. Quá trình này đôi khi được gọi là điều khiển Volt trong một Hertz. Các phương pháp khác như điều khiển vector và điều khiển trực tiếp mô-men cho phép từ thông và mô-men cơ học của động cơ được điều khiển một cách chính xác hơn.
Ở tầng chuyển đổi DC trở về dạng sóng sin được biết đến như một mạch chuyển đổi. Mạch này thường sử dụng độ rộng xung (PWM) để hiệu chỉnh cả hai tần số điện áp ra và điện áp theo yêu cầu. Quá trình này được minh họa trong hình 3.
Các bộ điều khiển mới hơn thường sử dụng các transistor đặc biệt gọi là IGBTs. Chúng là các công tắc điện tử có thể hoạt động thông qua một dải đo độ rộng dòng điện, chúng có tính hiệu quả cao và chuyển đổi nhanh, làm cho chúng trở nên lý tưởng khi sử dụng cho PWM.
Một chip vi điều khiển được sử dụng để điều khiển cho VFDs hoạt động. Thông thường có một dải đo có thể được cài đặt để điều khiển cho sự hoạt động để điều khiển: gia tốc và giảm tốc, cài đặt điểm tốc độ tối đa và vận tốc, và điểm cực đại của dòng điện thường là một giá trị chung. Kết nối chân digital I/O cho start/stop, báo động, và thiết lập lại lựa chọn cho tốc độ cũng rất phổ biến. Những điều này có thể được đi dây phần cứng hoặc dựa vào các giao tiếp kết nối khác. Giá trị analog cũng có thể được giao tiếp với bộ điều khiển như một tín hiệu từ 0 đến 10V hoặc 4 đến 20mA hoặc sắp xếp các giá trị truyền thông từ một bộ điều khiển.
Một OIT cũng có thể được gắn phía trước bộ điều khiển để cài đặt đo đạc và xem xét các dữ liệu hoạt động, như dòng điện hoặc tốc độ. Những yếu tố này có thể được xây dựng trong bộ điều khiển hoặc có thể loại bỏ nên chúng có thể được chia sẻ giữa các biến tần khác với nhau. Giống như một hệ thống servo, biến tần có thể được sử dụng với một thiết bị phản hồi như encoder và resolver để cải thiện khả năng điều khiển; tuy nhiên, một bộ điều khiển thông thường như PLCs hoặc DCS được sử dụng như một vật trung gian giữa một thiết bị và một bộ điều khiển.
VFDs có thể được hoạt động ở các tốc độ trên danh sách tốc độ của động cơ, tùy thuộc vào các ứng dụng. Ở mức trên 150 phần trăm, động cơ thường được khuyến khích nên sử dụng hộp số. Một mối quan tâm nữa khi thiết kế một hệ thống sử dụng VFD là khoảng cách động cơ đến bộ điều khiển. Tại khoảng cách trên 150Ft hoặc hơn, một hiện tượng được gọi là sóng phản xạ có thể xảy ra vì tốc độ chuyển đổi của transistor quá nhanh. Hiện tượng này có thể gây ra điện áp cao trong hệ thống cáp và động cơ. Có một số cách để giảm bớt tình trạng này, bao gồm cả sử dụng bộ lọc nhiễu và sử dụng động cơ biến tần, nhưng một bộ điều khiển lý tưởng nên được đặt gần với vị trí của động cơ.
